
“In het artikel over afkortingen werd een uitspraak gedaan die suggereerde dat de term zes-assige IMU was ontsproten aan het brein van een overijverige medewerker van de afdeling marketing”, zo schrijft Jan van Zeggelaar. “En dat is dus niet zo. Een zes-assige IMU doet wel degelijk meer dan een drie-assige.” Heeft Jan gelijk?
Wie kaatst, kan de bal verwachten. Wat ik letterlijk schreef was: “een zes-assige IMU is een drie-assige IMU van een motorfabrikant, waarvan de marketingman niets van natuurkunde snapt.” De hengel was ingeworpen. Jan bleef aan het haakje hangen, maar hij voelt zelf ook aan waar de schoen wringt, getuige zijn volgende zin: “Hoewel je over de zuiverheid van de term kunt discussiëren.”
Nerds
Ik kom uit een gezin vol nerds, en discussiëren over futiliteiten doen wij graag. Schijnen de lampen van een auto nog als die harder gaat dan de snelheid van het licht? Van die dingen. Ik krijg ook de kriebels als verkopers op Marktplaats.nl schrijven “verkeerd in goede toestand”. Kom op jongens, we hebben toch allemaal lagere school gehad? Stam + t? Ik verkeer, jij verkeert. 80% doet het verkeerd. Dat moet dan wel weer met een ‘d’. Ik krijg ook kromme tenen als iemand het over handvaten heeft, terwijl hij handvatten bedoelt. Ik weet dat zoveel mensen dat fout doen, dat de Van Dale het inmiddels niet meer als fout, maar als minder juist betitelt, maar toch. Voor jongeren onder ons: de Van Dale is geen leuk meisje dat gelijk heeft omdat ze er knap uitziet en een TikTok-kanaal heeft waarop ze complottheorieën of gesponsorde artikelen promoot, maar een boek waarin wetenschappers van elk woord de juiste schrijfwijze, uitspraak en betekenis hebben gezet. Kijk er eens in. Ook word ik wat kriegel als marketingmensen de waarheid geweld aandoen omdat ze er niets van snappen of omdat het beter klinkt. Niet elke tweecilinder-lijnmotor is een paralleltwin en een zes-assige IMU… Tja.
Wat kost motorrijden nu echt? We zetten het op een rij voor je
Blokkeren of niet
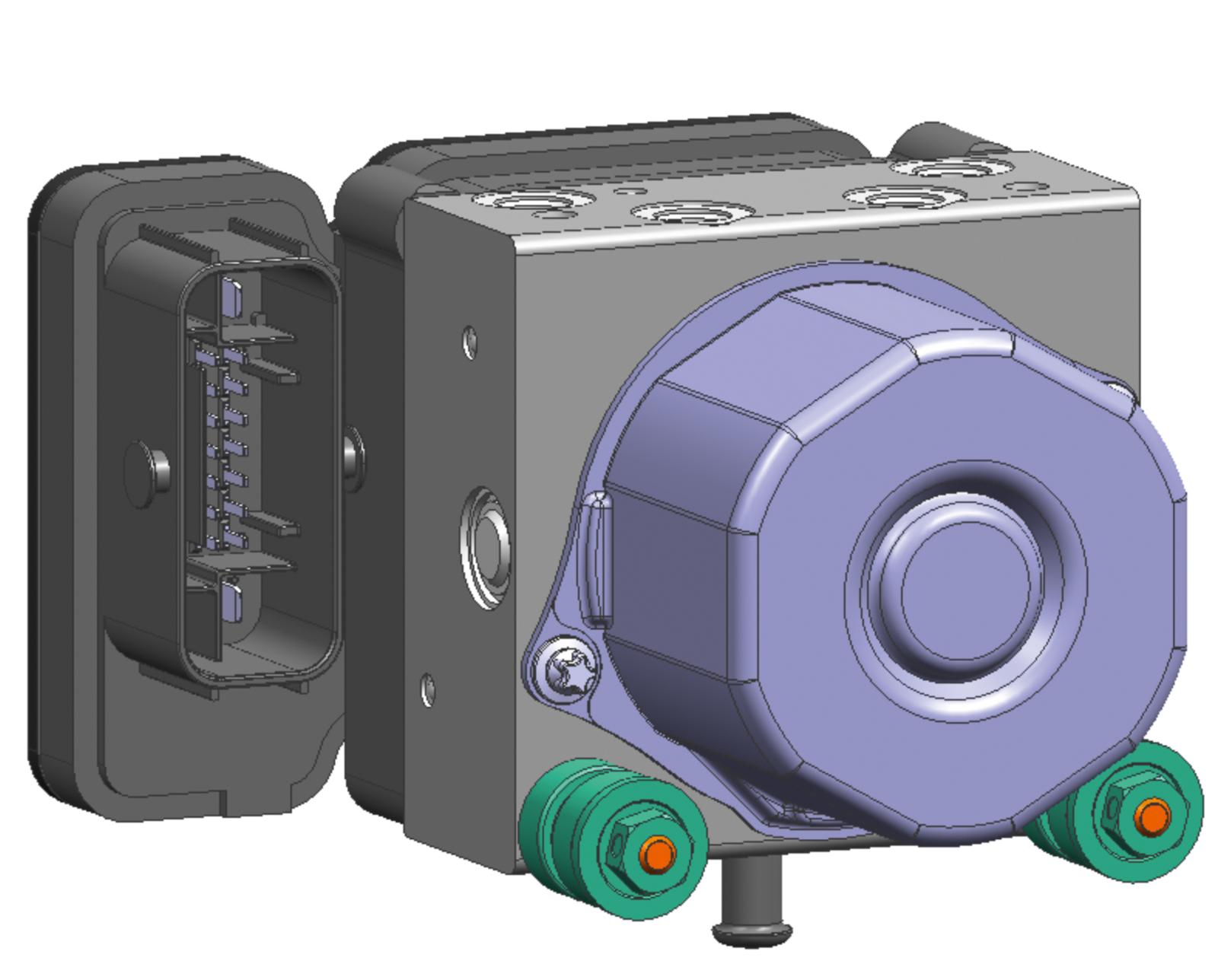
Om te beginnen: wat is een IMU eigenlijk? Een IMU is een sensordoos die alle bewegingen van een motorfiets registreert. Ze zorgt dat assistentiesystemen van de motorfiets bochtafhankelijk kunnen functioneren. Assistentiesystemen voor motorfietsen zijn de laatste jaren enorm doorontwikkeld. Het begon allemaal met een antiblokkeersysteem, kortweg ABS. Een conventioneel ABS-systeem meet de snelheid van elk wiel met behulp van een sensor en een tandkrans. Als er een tand langs de sensor komt, verandert het magnetisch veld in de sensor, waardoor deze een spanningspuls genereert. Door het aantal impulsen dat de sensor per seconde opwekt, kan de ABS-computer bepalen hoe snel het wiel draait. Deze computer kan de snelheden van de twee wielen met elkaar vergelijken en kan ook uitrekenen hoe snel de wielen vertragen. Daaruit kan hij concluderen dat een wiel begint te blokkeren. Als dat zo is, zal de ABS-computer twee ventielen activeren: het ene ventiel blokkeert de remleiding van de hoofdremcilinder naar de rem, zodat je niet nog harder kunt remmen. Een tweede ventiel laat remvloeistof uit de leiding naar een accumulator wegstromen, zodat de remdruk daalt en het wiel weer kan gaan draaien. Dan wordt dit aflaatventiel gesloten en het toevoerventiel weer geopend, zodat je weer remdruk kunt opbouwen. Tot het wiel weer blokkeert. Dan herhaalt de procedure zich, waarbij een elektrische pomp de remvloeistof uit de accumulator terugpompt naar de remleiding tussen het blokkeerventiel en de hoofdremcilinder. Dat voel je als het trillen van het remhendel of het rempedaal.




Remmen of sturen
De eerste ABS-systemen remden om de meter, moderne doen het zo snel dat je het niet eens meer merkt. Ze kunnen je laten remmen met een bijna constant slippercentage van een aantal procenten, aangezien banden de meeste wrijvingskracht leveren wanneer ze 10-30% slip hebben. Op die manier haal je dus de kortste remweg. Ouderwetse ABS-systemen hebben echter een nadeel: ze werken eigenlijk alleen rechtuit goed, als je alle beschikbare wrijving voor het remmen in kunt zetten. Ik heb ooit op de kartbaan van Walibi zitten kijken naar de manier waarop de meeste rijders een knijpende U-bocht namen. Ze stuurden te hard en te vroeg in, moesten steeds scherper sturen totdat de kart bijna begon te glijden en als ze dan tot de constatering kwamen dat ze de bocht niet haalden, trapten ze op de rem. Dan gingen ze rechtdoor de bandenstapels in. Want als je alle grip gebruikt om te sturen, heb je niets over om te remmen. Met een motor is dat niet anders. De grip die je over hebt om te remmen, is de totale grip minus de grip die je gebruikt om te sturen.
Grip
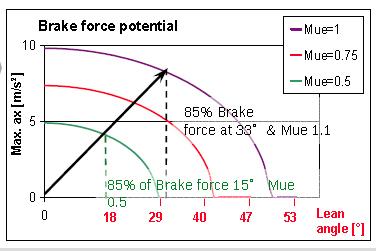
Om te voorkomen dat je in bochten te dicht bij de slipgrens komt, zijn motorfiets-ABS-systemen nogal eens ‘voorzichtig’ getuned voor meer marge in de bochten, ten koste van de remweg rechtuit. Een ander probleem is de oprichtneiging. Die ontstaat doordat je in een bocht op de zijkant van de band rijdt, terwijl de stuuras door het midden van de band gaat. Tijdens het remmen werkt de remkracht dus niet netjes in het midden van de stuuras, maar een paar centimeter opzij daarvan, waardoor een draaiend moment op het stuur ontstaat. Die zorgt ervoor dat de motor zich opricht en een wijdere bocht gaat lopen. Dat is ongewenst, zeker als je de bocht toch al nauwelijks haalt.
Voor een ABS-systeem zou het dus handig zijn om te weten hoeveel grip je gebruikt om te sturen. Een maat daarvoor is de hellingshoek, maar die vertelt niet het hele verhaal. Bij keren op de weg kun je een motor behoorlijk plat leggen, terwijl je heel langzaam gaat en niet veel grip gebruikt. De hellingshoek in combinatie met de snelheid zegt iets, maar nog directer is de centripetale kracht. Dat is de kracht die zijdelings op de motor wordt uitgeoefend, naar het centrum van de bochtstraal. De middelpuntvliedende kracht wil de motor naar buiten trekken, de grip van de banden trekt hem naar binnen. Ze zou dus eigenlijk zowel de hellingshoek als de zijdelingse kracht willen meten.
IMU
In 2013 ontwikkelde Bosch voor dit doel de eerste ‘Inertial Measurement Unit’ of IMU, zoals die ook nu nog worden gebruikt. Die IMU had acceleratiesensoren die de versnelling in drie richtingen mat, en een gyroscoop die de hoekverdraaiingen van de motor in elke richting mat. Een moderne(re) IMU doet dat nog steeds. Een acceleratiesensor meet in de rijrichting acceleratie en remkracht. Een sensor meet dwars op de rijrichting zijdelingse versnelling – centripetale kracht dus. In de hoogte meet een sensor eveneens versnelling, die optreedt als je door een kuil rijdt of over een hobbel.
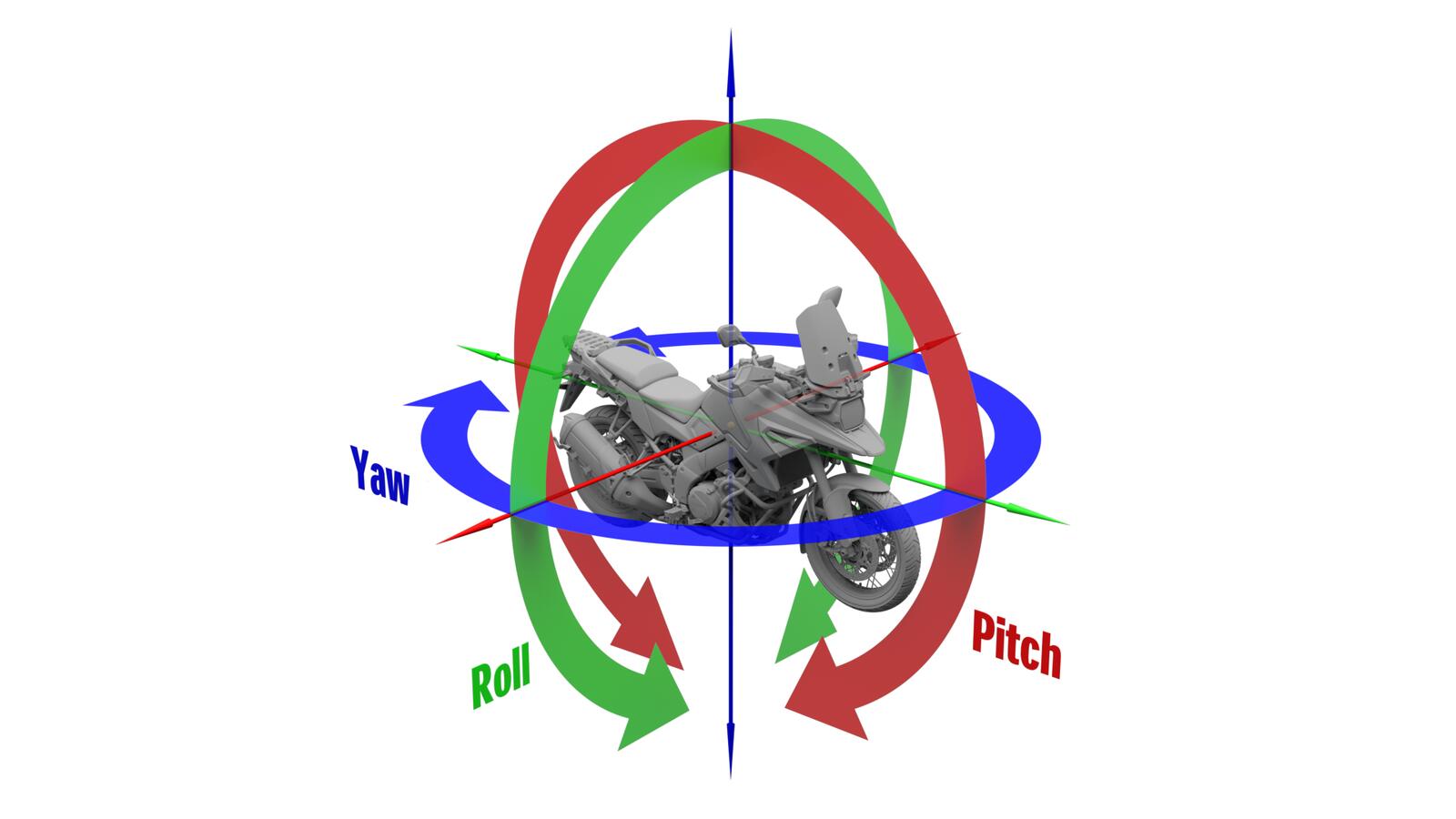
De gyroscoop is de hellingshoeksensor: die meet de hoekverdraaiing over de lengteas, dat is de hellingshoek of ‘roll’ als je door een bocht rijdt. Deze sensor meet ook hoekverdraaiing over de breedte-as, dus als je een wheelie of een stoppie maakt. Dat heet de ‘pitch’. Dan meet hij ook nog hoekverdraaiing over de hoogte-as, wat bijvoorbeeld gebeurt als de achterkant van de motor uitbreekt. Dat heet ‘yaw’.
Techniek Motorfiets verlagen: verbeter je rijcomfort
Bochtafhankelijke systemen
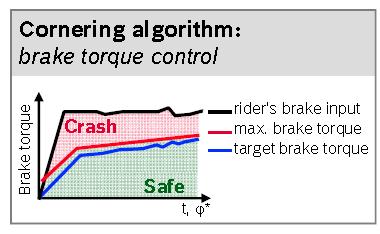
De ECU gebruikt de informatie van de IMU om zowel de remkracht als de remkrachtverdeling van het ABS of de aandrijfkracht van tractiecontrole af te regelen. Bij het bepalen van de toegestane ‘Target Grip’ houdt het systeem rekening met het veranderende contactvlak van de band en de verandering van het zwaartepunt wanneer een motor in de bocht ligt. Het gevolg hiervan is dat het bochtafhankelijke ABS voorkomt dat de wielen slippen als er in een bocht – met een hellingshoek – wordt geremd, dat het de oprichtneiging beperkt als in een bocht wordt geremd en dat het voorkomt dat je over de kop slaat als je te hard remt. Bovendien voorkomt de tractiecontrole achterwielslip als in een bocht gas wordt gegeven en voorkomt het tevens dat het voorwiel te ver loskomt als er fel wordt geaccelereerd. Tegenwoordig zijn er nog meer systemen die er gebruik van maken, zoals hill hold en stoppie control. Tractiecontrole kan tegenwoordig zelfs een bepaalde mate van slip en drift toestaan, waarbij je vaak zelf kunt instellen hoeveel. Ook het interventieniveau van ABS kun je tegenwoordig vaak instellen.
Drie dimensies
Ooit was ik tekenaar-constructeur. In 2D, oftewel, met papier, potlood en liniaal. Ik had maar twee dimensies: lengte en breedte. Wilde ik de hoogte weergeven, dan had ik een ander aanzicht nodig, met de breedte en de hoogte. Of de lengte en de hoogte. Tegenwoordig teken ik hobbymatig in 3D, in Tinkercad. Dat is fraai, want daarin kan ik hoogte, breedte en lengte tegelijk zien. Je kunt daarbij kiezen voor twee verschillende perspectieven. In beide heb ik drie assen: hoogte, breedte en lengte. Dat zijn dus geen zes assen, maar twee manieren om naar drie assen te kijken. U voelt hem aankomen: een motorfiets-IMU meet acceleratie langs de lengte-as, de breedte-as en de hoogte-as. Daarnaast meet hij hoekverdraaiing over diezelfde drie assen. Dat levert zes datasets op waarmee de ECU kan rekenen. Maar al die datasets zijn gemeten op of over één van de drie assen: lengte, breedte of hoogte. Meer smaken zijn er niet. Sommige merken noemen hun IMU een zes-assige IMU, omdat hij zes datasets oplevert, maar mijns inziens is dat niet correct: al meet je 25 datasets, je blijf dat doen over de lengte, de breedte en de hoogte. Dat zijn en blijven drie assen. Een zes-assige IMU bestaat dus niet.
Foto’s: archief




Om het zuiver te houden zou je in het stukje “IMU” alleen de term “versnelling” (acceleratie/deceleratie) moeten gebruiken en niet ‘kracht’. Misschien dat de controle box waar de IMU aanhangt een kracht berekent, maar dat kan alleen als er een massa bekend is. En de gyroscoop meet de hoeksnelheid (angle rate) in de meeste gevallen. Er zijn ook IMU’s die de hoekversnelling meten.
Kijk, daar steek je nou nog eens wat van op. Leuk artikel. Ik weet niet zoveel van wiskunde e.d. maar had me afgevraagd hoe dat nou zat met die 6 assen. Nou nog de discussie of het er echt veiliger van wordt. Iedere idioot kan een supermotor met deze elektronica knetterhard een bocht in pletteren zonder nadenken. De motor lost het zelf op (chargeermodus). Gaat men er dus harder mee rijden? Voor de “gemiddelde” rijder zal dit een mooie ontwikkeling zijn.
Goed verhaal Peter.
Dat zal ze leren, die taalbedervers en pseudotechneuten
Ik ben alleen bang dat degenen waar je je op richt dit bij gebrek aan plaatjes en mooie meisjes niet gaan zien, en lezen doen ze natuurlijk al lang niet meer, zeker zo’n technisch verhaal waar je verdorie nog echt over na moet denken tijdens het lezen, oef, zwaar.
Mij deed je er echter wel een plezier mee, dat zei gezegd. Dus, Dankjewel.
Han.