
In moderne motorfietsen zit tegenwoordig veel technologie. Met name op het gebied van assistentiesystemen is er enorm veel vooruitgang geboekt. Het probleem is dat bij het publiek nauwelijks bekend is wat er allemaal mogelijk is. Daarom organiseerde KTM een techdag, die meer duidelijkheid moet verschaffen.
In 1929 werd er voor het eerst een antislipregeling ontwikkeld. Het duurde tot 1978 voordat er voor het eerst een auto met ABS werd uitgerust. Dat was de Mercedes-Benz S-klasse (W116). Het systeem werd samen met Bosch ontwikkeld. Bosch stond ook aan de wieg van het eerste ABS-systeem voor motorfietsen, waarvoor BMW K100 in 1988 de eer kreeg. Sindsdien is de ontwikkeling van ABS echter niet stil blijven staan, met name bij motorfietsen. Dat is opnieuw te danken aan Bosch, dat in 2013 samen met het Oostenrijkse motormerk KTM een bocht-afhankelijk ABS op de markt bracht. Dat werd mogelijk dankzij de ontwikkeling van een sensor, die de acceleratie in de rijrichting, dwars daarop en in de hoogte kon meten, alsmede de rotatie rond diezelfde lengte-, breedte- en hoogte-as. Zo’n sensor heet een Inertia Measurement Unit, kortweg IMU. Omdat zo’n sensor zes grootheden kan meten noemen veel fabrikanten het een 6-assige IMU. Strikt genomen klopt dat natuurlijk niet, het is een 3-assige IMU die op elke as twee grootheden meet.
Techniek tweetakt met kleppen: kan dat wel?
Hydraulische overbrenging
Wanneer je flink in het remhendel knijpt, wordt de trekkracht op de hendel via een overbrenging op de zuiger van de rempomp gezet. Deze heeft een zuigeroppervlak van ongeveer 1 cm2, waarmee je een vloeistofdruk van ongeveer 120 bar kan bereiken. Dat komt omdat het remsysteem is gevuld met remvloeistof. Lucht is samendrukbaar, remvloeistof niet. Bij lucht wordt het volume kleiner, met nauwelijks drukopbouw, bij remvloeistof wordt de kracht direct omgezet in druk, zodra de remblokken tegen de schijf aanliggen. Een andere eigenschap van een hydraulisch systeem is dat de druk in dat systeem overal gelijk is. Dezelfde druk van 120 bar wordt dus uitgeoefend op de zuigers van de wielremcilinders. Die hebben gezamenlijk een oppervlak dat ongeveer twintigmaal zo groot is als de rempomp. Dat betekent dat de remblokken voor elke 10 N (1 kg) die je op het hendel uitoefent, met 200 N (20 kg) op de remschijf worden geduwd. Dat wil zeggen, totdat het ABS ingrijpt.
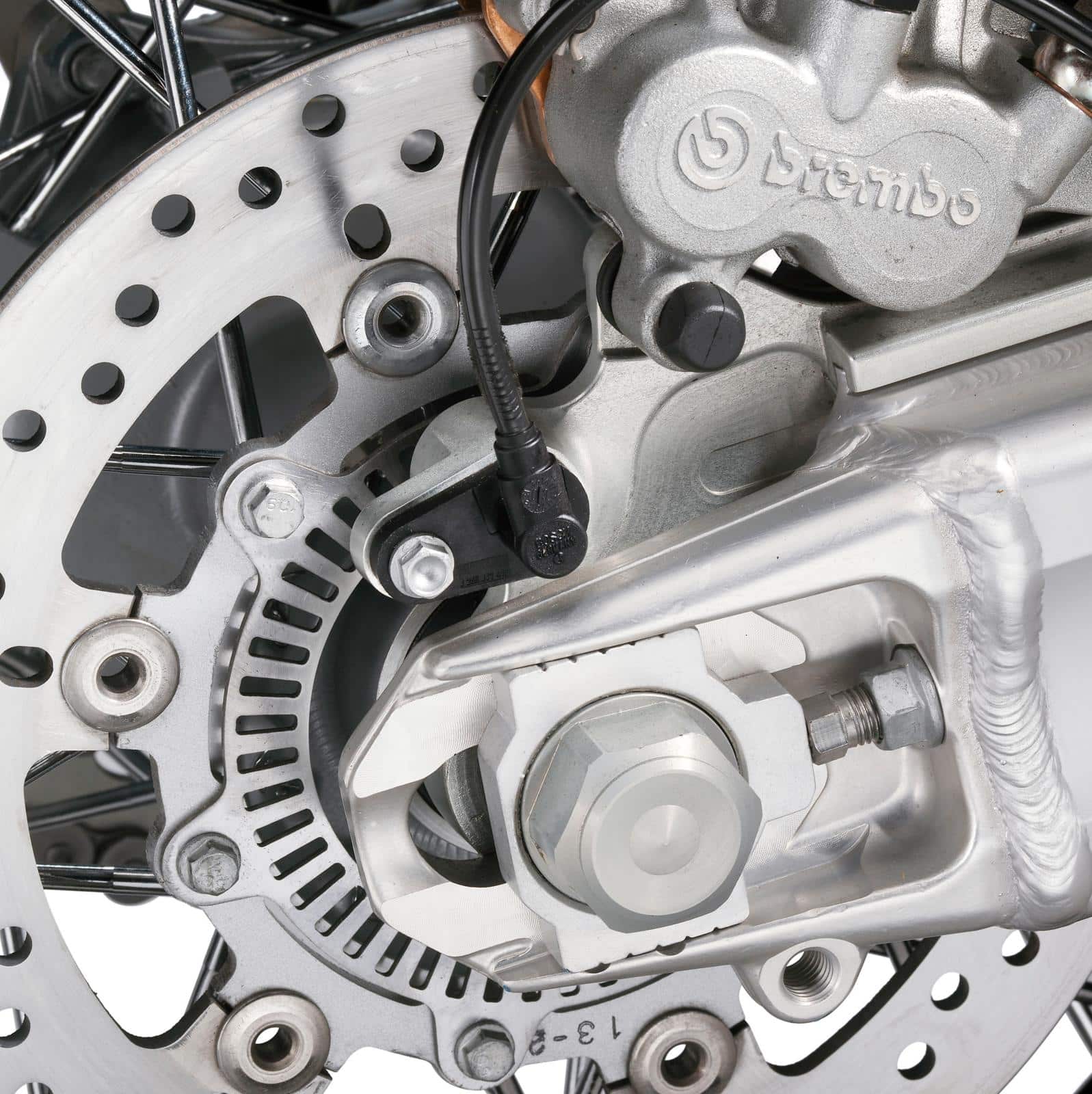
Hall-sensor
Om in te kunnen grijpen, moet een ‘gewoon’ ABS twee zaken weten: de druk in het remsysteem en de snelheid waarmee de wielen draaien. Daarvoor heeft hij een druksensor in het hydraulisch systeem en een geperforeerde ring in het wiel, waar een hall-sensor vlakbij staat. Bij zo’n hall-sensor zorgt een spoeltje voor een magnetisch veld. Draait er een gat van de geperforeerde ring langs de sensor, dan verandert het magnetisch veld en dat doet het nogmaals als een massief deel van de ring langs de sensor draait. Een veranderend magnetisch veld in een spoel geeft een spanning. Er ontstaat dus een wisselspanning op de hall-sensor, die evenredig is met de draaisnelheid van het wiel. De ECU kan op die manier de draaisnelheid van het voor-en het achterwiel vergelijken en, wanneer hier een verschil tussen is, besluiten de druk te verlagen in de leiding naar het wiel dat dreigt te blokkeren.
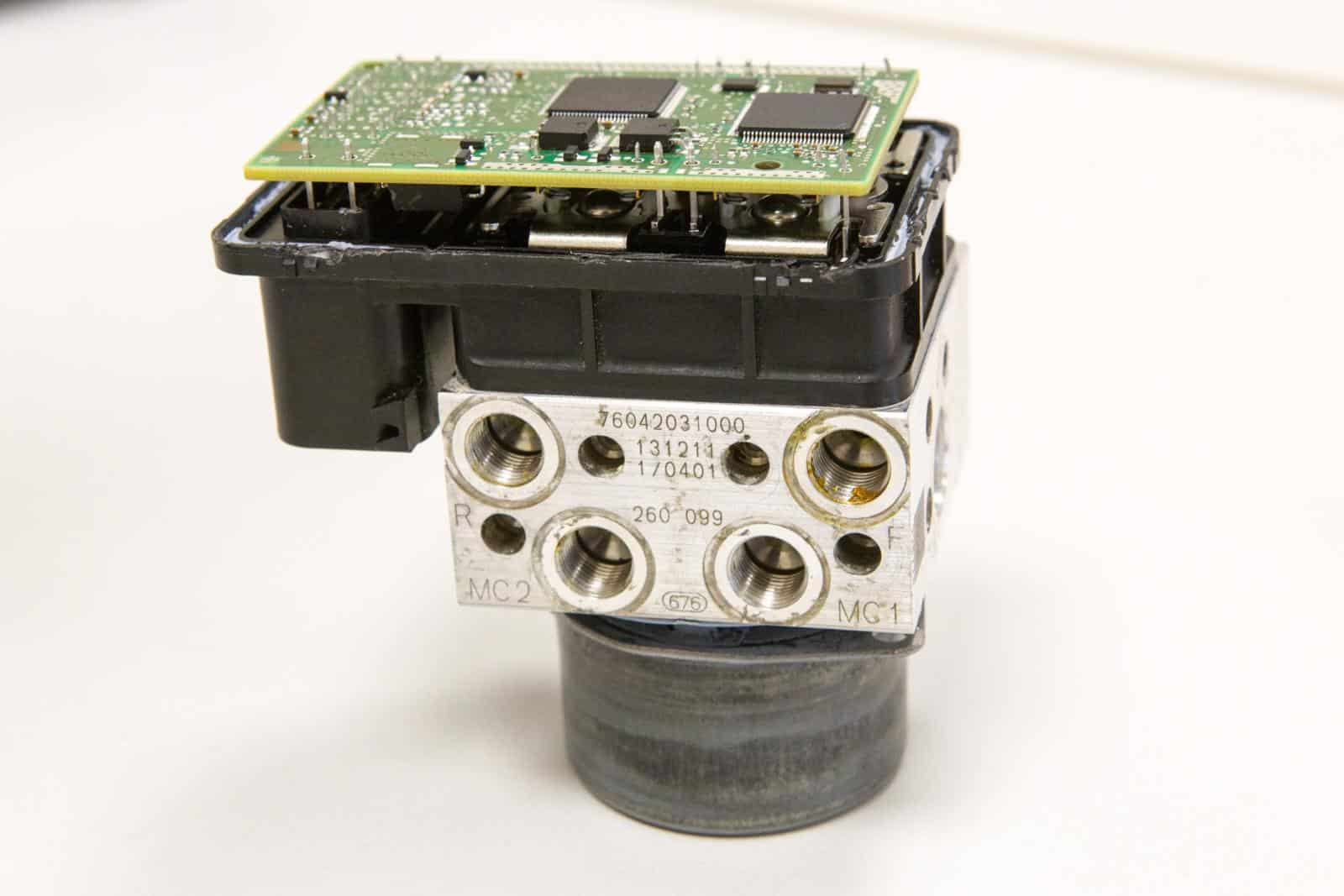
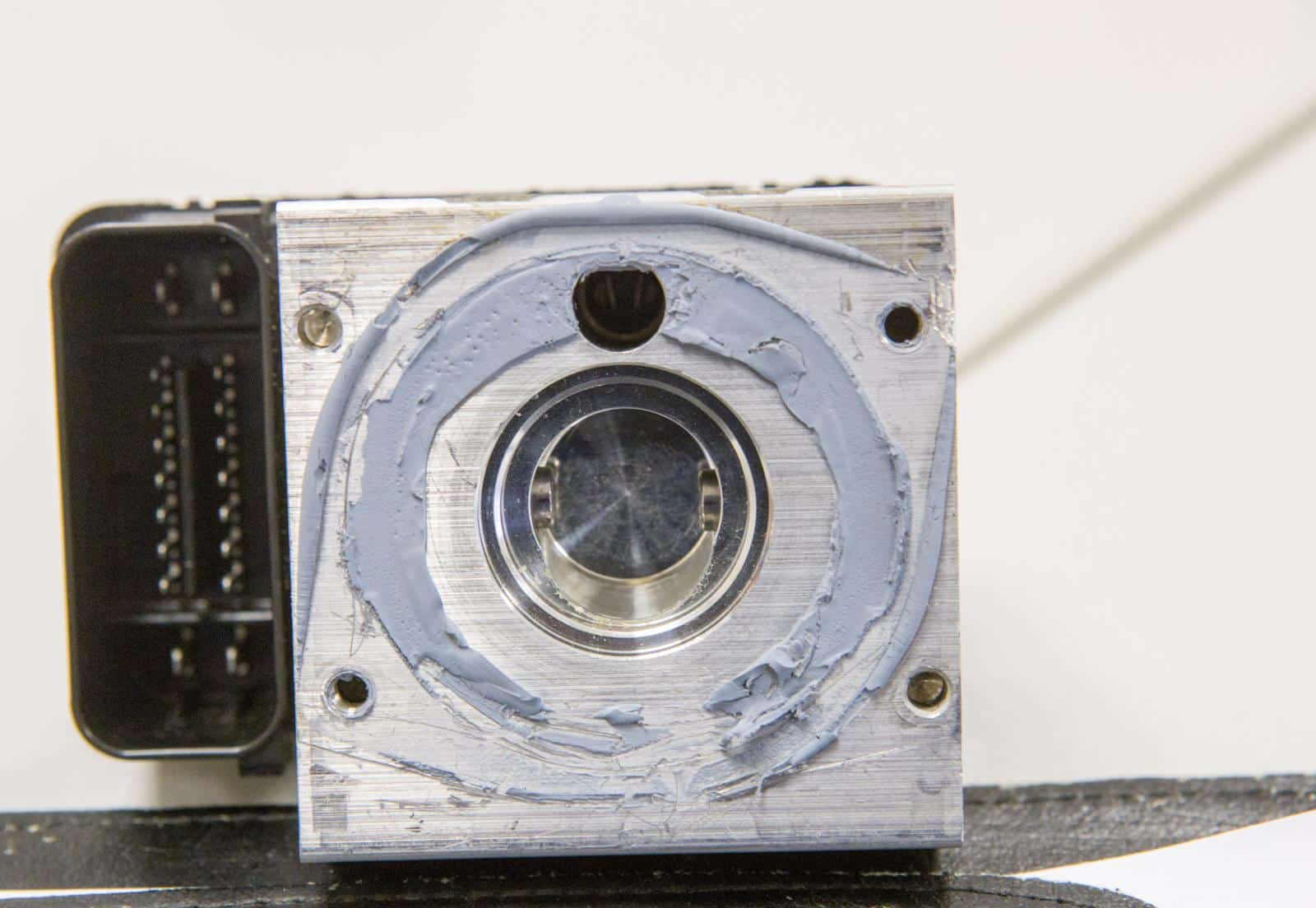
Modulator
Het verlagen van de druk is de taak van de ABS-modulator. Dit is een kleppenblokje, dat vloeistof uit het remsysteem kan laten weglekken naar een accumulatiekamertje. Daar zijn er twee van, slechts enkele druppels groot, één voor het voorwiel en een voor het achterwiel. Tegelijkertijd wordt de toevoer vanaf het remhendel of het rempedaal onderbroken, zodat je de druk niet meteen weer kan opvoeren. Dat doet de modulator zelf, wanneer het wiel weer draait. Op de modulator zit een motortje, dat een lager excentrisch ronddraait in een sponning. Uit de zijwanden van die sponning steken twee plunjertjes. Het excentrische lager zorgt dat de plunjers remdruk voor pompen. Ze kunnen tot 120 bar tegendruk geven. Zo zijn er nu drie stadia mogelijk. Fase één: het systeem doet niets, want er dreigt geen gevaar. Fase twee: het systeem detecteert dat een van de wielen mogelijk gaat blokkeren. Dat kan de ECU uitlezen uit de mapping. Dat is een soort matrix of spreadsheet, waarin de fabrikant heeft vastgelegd bij welke snelheid en opbouw van de remdruk dit gevaar dreigt. De modulator kan hierop reageren door de remdruk te beperken tot, bijvoorbeeld, 70 bar. Fase 3 is de paniekstand: als het wiel blokkeert, wordt de remdruk volledig afgelaten, totdat het wiel weer draait.







Fases
Dankzij de IMU kan de ECU over een extra dataset beschikken: de ECU kan namelijk de remvertraging meten. Ze kan dan in de eerste remfase de remdruk beperken. Wanneer de remvertraging toeneemt, wordt het voorwiel harder op het wegdek geduwd en is er meer remkracht mogelijk. De ECU kan dan de remdruk naar het voorwiel toe laten nemen, zodat de remvertraging wordt geoptimaliseerd. De IMU meet echter ook de zijdelingse versnelling en de hellingshoek – 100 x per seconde – wanneer je door een bocht rijdt. In een bocht wordt een deel van de mogelijke wrijvingskracht gebruikt voor de spoorkracht, dus is er minder grip over voor remkracht. Ook daar is een mapping voor, zodat het bochtafhankelijke ABS ook kan voorkomen dat het in paniekfase 3 terechtkomt wanneer je in een bocht flink in de remmen knijpt. Iets dat ervaren motorrijders uit de pre-ABS-tijd niet gauw zullen doen. Vroeger ging je dan gewoon onderuit als je dat deed. En zo niet, dan merkte je dat de motor zich door het remmen oprichtte en een ruimere bochtstraal ging rijden. Je kon dan op de verkeerde weghelft terechtkomen, of in de berm. Met modern bochten ABS is ook dat probleem uit de wereld: het systeem zorgt ervoor dat de achterrem dusdanig hard mee remt, dat de motor zich niet meer opricht en je de oorspronkelijk bedoelde bochtstraal netjes blijft rijden.
Techniek Öhlins Smart EC3: schakelen tussen jouw dempinginstellingen
Offroad/Supermoto-modus
Wanneer je offroad rijdt, stel je andere eisen aan het remsysteem. Op een gravel-pad wil je de achterrem juist wel kunnen blokkeren. Op die manier kun je de motor bij het aanremmen van een bocht al een beetje dwars zetten, zodat de neus al de goede kant uitwijst als je bij de bocht aankomt. Dan kun je sneller de bocht uit accelereren. Ook sportieve Supermoto-rijders vinden het leuk om op die manier op een bocht af te surfen. KTM kent dan ook een speciale offroad- en supermoto-modus. In beide modi kan het achterwiel blokkeren en is het systeem niet hellingshoek-afhankelijk. Ook is de rear wheel lift detectie – opnieuw mogelijk dankzij de IMU –niet actief in offroad- of supermoto-modus. Fase 2 bestaat ook niet, als het systeem ingrijpt is het gelijk fase 3, maar daar is wel verschil in hoe het systeem ingrijpt: de Supermoto-modus staat geen voorwielslip toe en grijpt dus direct in. De offroad-modus staat een kort moment van blokkeren toe, zodat er zich een soort boeggolfje van zand voor de band kan ophopen, wat voor extra vertraging zorgt. Dan is er nog een track of rally-modus: daarin kun je alles zelf instellen.
Tractiecontrole
Tegenwoordig is bijna elke motorfiets uitgerust met ride-by-wire. De gasgreep is een potentiometer geworden, de gaskleppen worden met een stappenmotor bediend, niet met een gaskabel. En aangezien ook ABS gemeengoed is en de wielsensoren er dus al zijn, kom je tractiecontrole ook steeds vaker tegen. Eenvoudige tc-systemen grijpen pas in als het achterwiel dreigt door te slippen. Het meet een verschil tussen voor- en achterwielsnelheid en draait de gaskleppen dicht. Dat is bij motorfietsen eigenlijk ongewenst, wanneer dat in een bocht gebeurt. De motor slipt dan zijdelings iets weg totdat het systeem de gaskleppen dichtdraait. Dan herstelt de grip en komt de achterzijde van de motor terug. Dat geeft onbalans. Dat is al verbeterd doordat de systemen sneller reageren, maar de hellingshoeksensor maakt nog een verbetering mogelijk: wanneer die een hellingshoek detecteert, zal het motormanagement het motorkoppel op de hellingshoek afstemmen, zodat tractieverlies in de meeste gevallen wordt voorkomen.
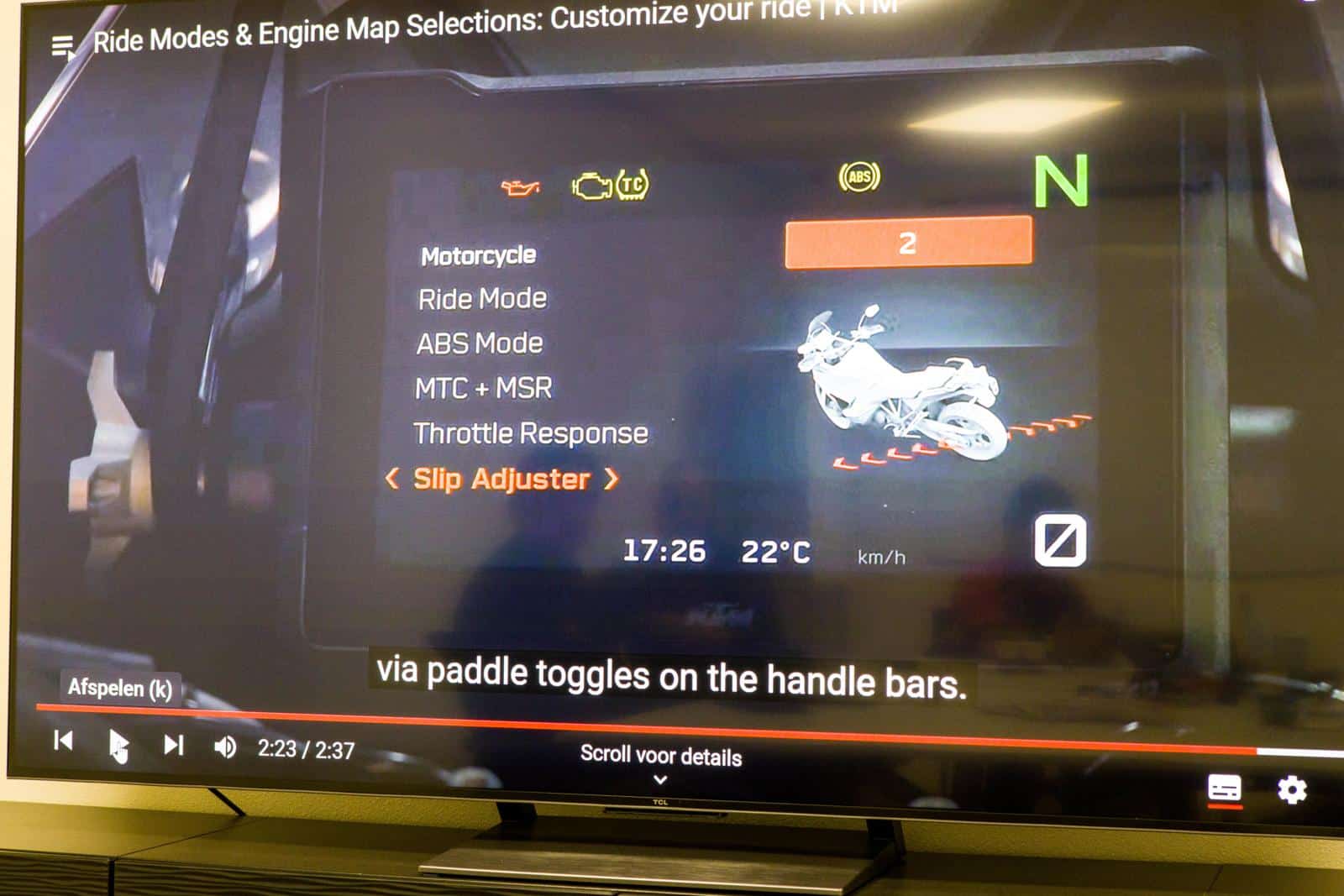
Modi
Ride-by-wire heeft het ook mogelijk gemaakt om het motorkarakter aan te passen op de omstandigheden of jouw wensen. Er zijn diverse modi, die vaak ook weer effect hebben op ABS, tractiecontrole, wheelie-detectie en soms zelfs op de veringinstellingen. Zo is er bij de meeste motormerken bijvoorbeeld een street- of road-modus. Bij KTM betekent dit dat de gashendel een normale gasreactie heeft, dat de tractiecontrole geen wielspin toestaat en dat het motorvermogen bij 0°-hellingshoek volledig beschikbaar is. Een lichte wheelie is in deze modus mogelijk. Dat is niet mogelijk in de rain-modus. Daarin is de gasreactie langzaam en is het vermogen beperkt tot maximaal 100 pk. Zoek je wat meer opwinding, dan is daar nog de sport-modus. Daarin is de gasreactie heel direct, de vermogensafgifte is maximaal, er is een lichte achterwielslip mogelijk en er zijn hogere wheelies toegestaan. Op straatmotoren kan er dan nog een track-modus zijn, waarin je alles zelf kunt configureren. Op allroads vind je nog een offroad-stand, waarin je een progressieve gasreactie hebt en achterwielslip is toegestaan om over obstakels te kunnen rijden of om een zandheuvel op te kunnen rijden.
Rally modus
De overtreffende trap van de offroad-modus is de Rally-modus. Die geeft een zeer directe, felle gasreactie, terwijl de wheelie-detectie uitstaat. Zo kun je de motor van voren ‘licht’ maken door flink gas te geven, bijvoorbeeld om het voorwiel over een kuil te tillen. De rally-modus heeft ook nog een in negen standen instelbare drift control, waarmee je kunt instellen hoe ver de motor bij het uitkomen van de bocht mag uitbreken. Interessant is verder dat het dashboard zich aanpast aan de rijmodus, zodat de zaken die in die modus het belangrijkste zijn, het grootst in beeld staan. De modi zijn instelbaar via vier knoppen op de linker stuurhelft.
Adaptive cruise control
In het topsegment zijn motoren al enige tijd uitgerust met cruisecontrole. Nu sijpelt dat langzaam ook door naar de lagere marktsegmenten, terwijl je in het topsegment nu ook af en toe motoren met adaptive cruise control vindt. Dat kennen we natuurlijk van de autosector, maar bij motorfietsen zit er nog wel een addertje onder het gras: een motorrijder zit los op zijn motor, dus kan de adaptive cruisecontrole niet al te hard remmen. Beheerst remmen doet het wel, via de modulator van het ABS-systeem. Accelereren kan het systeem ook, bijvoorbeeld wanneer je het knipperlicht naar links aanzet. Bij wijze van overtake assist zal het systeem dan wat gas bijgeven. Andere systemen, die je tegenwoordig op motoren tegenkomt, zijn actieve bochtverlichting en een regelbare motorremwerking (Motor Slip Regulation). Die werkt door de gasklep iets verder open te zetten, waardoor er minder vacuüm in het inlaatspruitstuk zit. En dan is ook een quickshifter tegenwoordig gemeengoed. Inmiddels zijn er die in twee richtingen werken en die zelf tussen gas geven, zodat je ook kunt terugschakelen zonder de koppeling te bedienen. Tegenwoordig werken die in twee modi: in de snelle modus wordt de ontsteking 0,08 seconde onderbroken zodat je kunt schakelen. Detecteert het systeem via een extra sensor op de schakelklas dat er langzaam geschakeld wordt, dan onderbreekt het de injectie en sluit het de gaskleppen even, zodat je rustig kun schakelen. De beweging van de voet bepaalt dus welke modus de motorfiets kiest.
Bewijs
Zien is geloven, dus had KTM een aantal Adventures en een Husqvarna Norden voor ons klaar staan, waarmee we de paden op konden. En de blubber omdat het al de hele dag stortregende. Een goed moment om het ABS te proberen. In straat-modus merk je al gouw dat je lekker rechtuit over het zandpad kunt remmen, maar dat je wel een lange remweg nodig hebt. In de offroad-modus is die remweg inderdaad een stuk korter, terwijl je het achterwiel wat achter je voelt kwispelen als je die tot blokkeren afremt. Indrukwekkend. Ook de drift-control is bijzonder, op gravel kun je kiezen hoe erg je op je rally-helden wilt lijken en lekker schuin driftend door de bocht wilt zeilen. Tot het wat al te blubberig werd. Als er helemaal geen grip meer is, kun je beter naar de café-modus.
Perspectief
Veel motoren hebben ABS en tractiecontrole. Maar de ene ABS is de andere niet, niet alle tractiecontrolesystemen kunnen hetzelfde. Het is dus verstandig om bij het kopen van een motor even door te vragen wat er nu eigenlijk precies op zit en wat het allemaal kan. Zo heeft een KTM 390 Adventure al tractiecontrole, bochtafhankelijke ABS, een offroad-modus en een quickshifter. Zijn 400 euro duurdere concurrent uit Beieren heeft alleen ABS. Dat zet de zaak in perspectief.
Video’s
KTM heeft een paar video’s op youtube staan waarop de werking van bochtenabs en offroad abs heel duidelijk te zien is. Check Offroad ABS en voor Cornering ABS.




