
Mobiliteit zal in de komende twintig jaar harder veranderen dan in de afgelopen honderd jaar. Zeker omdat het erop lijkt dat de industrie en de politiek ditmaal de neuzen dezelfde kant op hebben staan als het gaat om zelfrijdende voertuigen. De voordelen zijn groot. Verkeersstromen kunnen worden verbeterd, het verkeer wordt veiliger, schoner en gemakkelijker en de ontwikkelingen kunnen Europa’s economie versterken. Ouderen worden weer mobiel en kunnen dus sociaal beter meedraaien.
| Beste redactie, Graag aandacht voor het volgende. In de discussie over autonoom rijdende (al dan niet al toegestaan) auto’s wil ik jullie vragen om een artikel te wijden in de bladen aan de veiligheid van ons als motorrijders. Aanleiding van mij om dit te vragen is dat de huidige Tesla series 3 en Y zijn uitgerust met enkel een optisch systeem. Met vriendelijke groet, Roel van Breugel |
Ook zijn er andere mobiliteitsmodellen mogelijk, zoals openbaar vervoer van deur tot deur of car-sharing, waarbij er automatisch een auto of motor voor komt rijden als je er een nodig hebt. Dan hoef je zelf geen auto en parkeerplaats of motor met stallingsplek te hebben. Dat spaart ruimte en kan enorm veel kilometers besparen. In Amsterdam alleen al wordt per dag 50.000 kilometer gereden op zoek naar een parkeerplaats. De voordelen voor beperking van het energieverbruik en – nu nog – CO2-uitstoot zijn dan ook groot, ook door beperking van de luchtweerstand door middel van platooning (treintje rijden) en door automatische afstemming van de snelheid op te verwachten obstakels, zoals stoplichten. Ook kunnen zelfrijdende auto’s een bijdrage leveren aan taxidiensten. De kosten per kilometer zijn te halveren als er geen chauffeur nodig is.
Fotografie: fabrikanten, Aansorgh
Veilig
Een van de argumenten, die door voorstanders van autonoom rijden wordt gebezigd, is dat het veiliger zou zijn. Daar is een sterk argument voor: wereldwijd vallen er jaarlijks 1,3 miljoen doden in het verkeer, waarvan 25.000 in Europa. Daarmee is het verkeer eigenlijk nog altijd bijzonder veilig, de kans om ooit in het verkeer te overlijden is kleiner dan één procent. Maar de impact is altijd groot. Het overkomt vaak jonge mensen en het afscheid is altijd plotseling. Reden om er dus toch wat aan te doen. Bijvoorbeeld door de zwakste schakel in het verkeer uit te schakelen: de mens. Mensen zijn gauw afgeleid, kijken op hun telefoon, worden moe of hebben last van ‘sportieve neigingen’, naast een zekere bereidheid risico’s te nemen of niet de competentie te hebben om deze goed in te schatten. Computers worden nooit moe, nemen geen beslissing op basis van testosterongehalte en zijn – mits goed geprogrammeerd en voorzien van goede fail-safe-systemen – zeer betrouwbaar.

Guardian
Voor automatisch rijden zijn vijf SAE-niveaus vastgesteld. Automatisch rijden begint op niveau 2, waar het voertuig een deel van de rijtaken daadwerkelijk overneemt, maar de rijder de omgeving in de gaten moet houden en het merendeel van de tactische rijtaken zelf verricht. Het ultieme level is niveau 5, waarin het voertuig alle rijtaken volledig overneemt en de rijder zelf niet meer alert hoeft te zijn. Bij die toenemende mate van automatisering zijn er een aantal uitdagingen, zoals de rijcondities, de weersomstandigheden en de tijd die de rijder nodig heeft of mag hebben om de controle weer over te nemen. Er wordt in de markt enorm gegoocheld met termen als automated, highly automated, partially autonomous of semi-autonomous. Maar eigenlijk is een voertuig pas echt automated als deze functies verricht met weinig of geen input van de mens. De term autonoom zou moeten betekenen dat het voertuig zichzelf volledig bestuurt. Dan is het voertuig de chauffeur. In alle andere gevallen is het voertuig een ‘guardian’, een bewaker of beschermengel.
Wetten
De vraag is hoelang het dan echt duurt voor we zelf niet meer achter het stuur hoeven plaats te nemen. Dat is niet alleen een technische uitdaging, maar ook een probleem van wetten en regels. Zo moeten de auto’s aan internationale standaards en wetten voldoen en het moet wettelijk toegestaan zijn om de auto of motorfiets te laten rijden en zelf achterin de auto een boek te lezen of de motorfiets zonder berijder ergens heen te sturen. Wie is er dan aansprakelijk bij ongevallen? De eigenaar of de fabrikant? Hoe is het verzekerd? Er is dus een gecoördineerde benadering nodig tussen de lidstaten op een Europees niveau om barrières weg te nemen en een stapsgewijs leerproces mogelijk te maken. Dat kreeg op 14 april 2016 vaste vorm toen de Europese Ministers van Transport in Amsterdam de ‘Declaratie van Amsterdam’ tekenden. Hierin wordt het belang van automatisch rijden voor de veiligheid, het milieu en de toekomst van Europa bevestigd en verklaren de ministers hun ambitie om ‘in 2019’ klaar te zijn voor de verdere uitrol van zelfrijdende voertuigen die met elkaar en de infrastructuur kunnen communiceren. ‘Doordat regelgeving en autosystemen op elkaar worden afgestemd, voorkomen we dat zelfrijdende auto’s en vrachtwagens straks bij iedere grens een nieuwe update nodig hebben’, stelde toenmalig minister Schultz van Haegen bij de ondertekening van de declaratie.



Assistentiesystemen
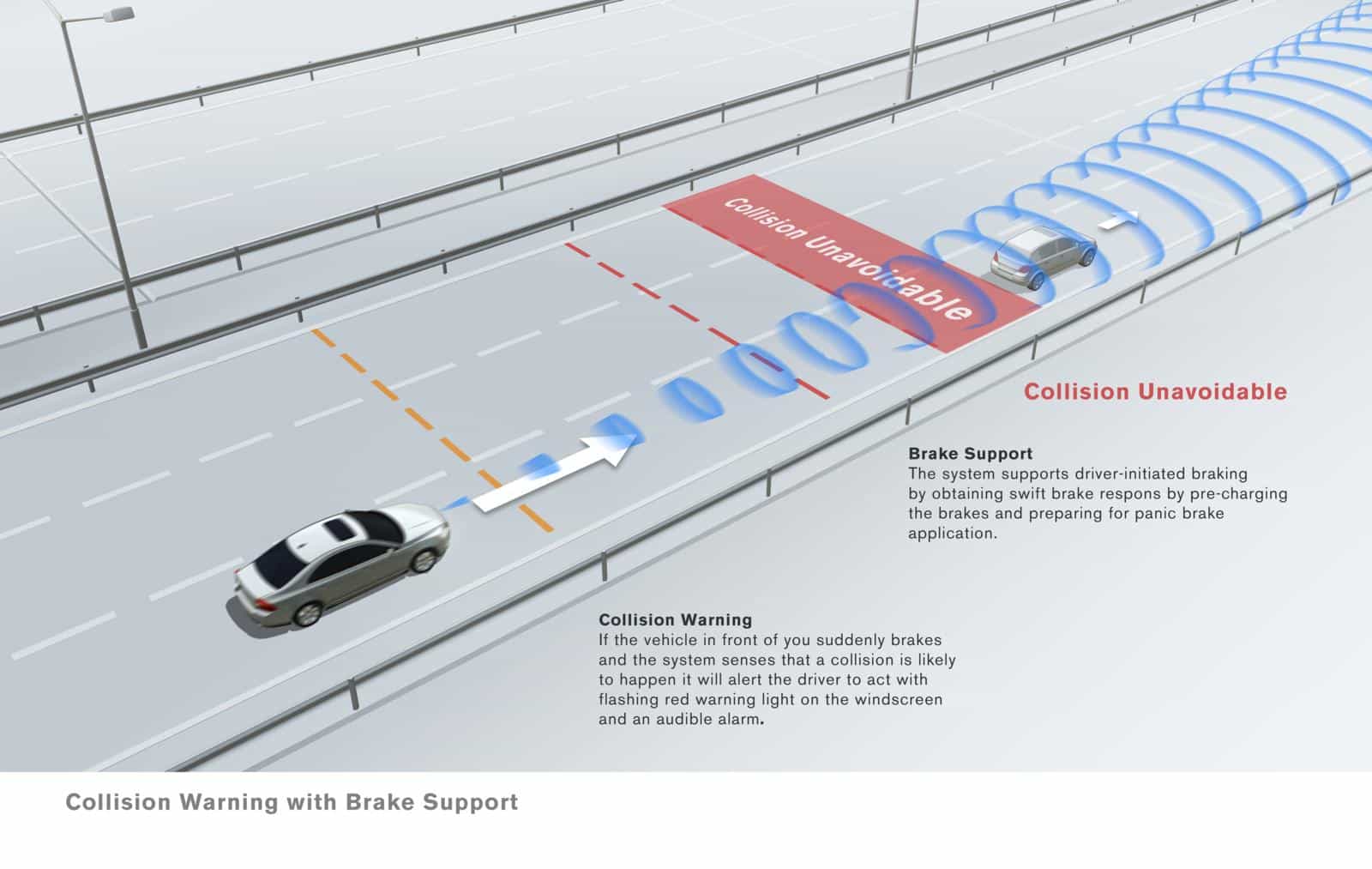
We zijn dus al even bezig met de introductie van zelfrijdende voertuigen. Er wordt ook al jaren gewerkt aan assistentiesystemen, die ook de basis vormen voor zelfrijdende voertuigen. Navigatiesystemen, road sign assist en snelheidsadvies zijn al doodnormaal, een dode-hoek-assistent en een rem-assistent zijn geen nieuws meer en van een automatische ‘hill hold’-handrem en een heuvel-assistent kijkt ook niemand meer op. Adaptive cruise control, dat de afstand tot de voorganger constant houdt, kennen we al sinds 2000. Een beetje luxe auto kan sinds 2009 al zelf fileparkeren of inparkeren en gaat ook zelf voor een obstakel in de ankers, als je niet wakker genoeg bent om dat zelf te doen. Sinds 2013 is er bij BMW een Traffic Jam Assistent, terwijl in 2015 de ACC met Lane Keeping Bottleneck Assist is geïntroduceerd. Een auto de garage inrijden met behulp van een afstandsbediening is sinds 2008 mogelijk. Automatisch op de snelweg rijden gebeurt al sinds 2011. In 2015 introduceerde BMW een experimentele i3, die na het uitstappen van de rijder zelfstandig op zoek gaat naar een parkeerplaats en die via een druk op de smartwatch zelf terugkomt naar de eigenaar. Toyota heeft haar Safety Sense-systeem, dat ook bijna al deze systemen heeft. Praktijkervaringen met de Prius met hun ‘lane departure alert’ bewijzen al dat er negentig procent minder frontale botsingen en zeventig procent minder aanrijdingen van de zijkant plaatsvinden. Het Lexus Safety System +A vult de Safety Sense-systemen aan met een ‘lane trace assist’, die de auto actief op de rijbaan tussen de wegmarkering houdt, een ‘pre-crash safety’, dat niet alleen remt voor obstakels, maar eventueel ook uitwijkt wanneer daar ruimte voor is, en een ‘parking support brake’, die bij het achteruitrijden remt wanneer er bijvoorbeeld kinderen achter de auto spelen. Met deze uitbereiding dekt het Lexus Safety System + A bijna de helft van de oorzaken van fatale ongelukken af. Die ratio stijgt door de in 2020 geïntroduceerde ‘Higway Teammate’, met onder meer een inhaalfunctie die ook van rijbaan kan veranderen.

Zelfrijdende motorfiets
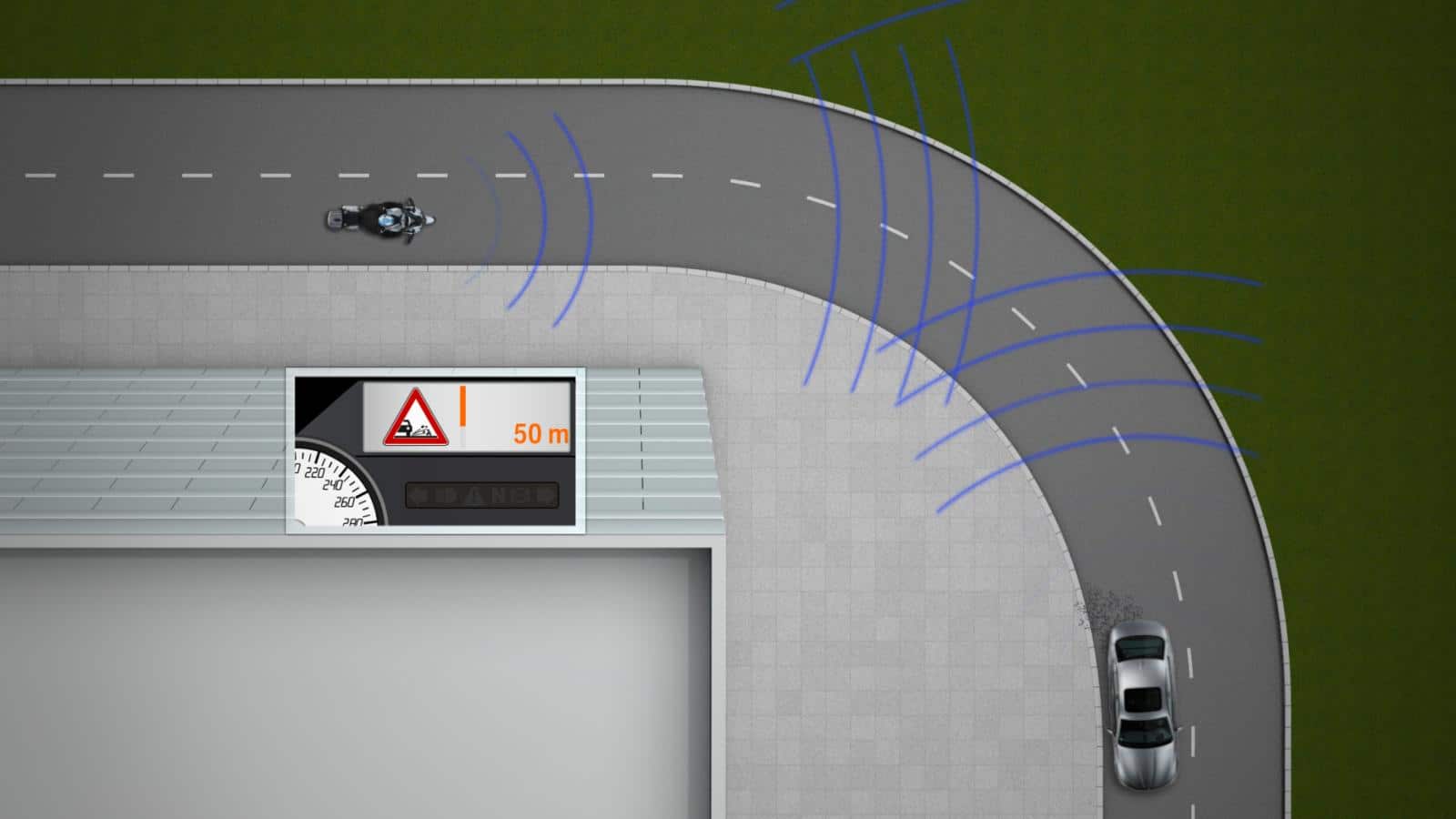
BMW toonde een paar jaar geleden ook al een experimentele autonoom rijdende motorfiets. Een motorfiets die zelf rijdt lijkt een middel zonder doel te zijn. Meestal ga je motorrijden voor je lol en zelfs als je van A naar B moet, kun je op een motor niets anders doen dan motorrijden. Toch ziet BMW een belangrijke functie voor de autonome technologie. Niet om de motor zonder bestuurder op pad te sturen, maar om de rijder te controleren en de motor indien nodig bij te sturen. Motorrijders halen soms bijvoorbeeld een bocht niet, omdat ze de motor niet ‘platter’ durven te leggen, terwijl dat best zou kunnen. Bij wildongevallen rijden ze vaak tegen het wild aan, omdat ze niet hard genoeg remmen of niet durven uit te wijken, terwijl automobilisten daarbij juist vaker een boom naast de weg raken. Dodelijke auto-ongevallen zijn in Duitsland in de laatste tien jaar dankzij ADAS met 73 procent gedaald. Motorongevallen zijn met 38 procent teruggelopen, mede dankzij ABS, bochten-ABS en traction control. Het helpt dus wel, maar niet genoeg. De autonome technologie kan de ideale koers en handelswijze bepalen en die vergelijken met de door de rijder gekozen parameters. Indien nodig kan het systeem dan ingrijpen door bij te sturen, te remmen of uit te wijken, of bij voorbaat al snelheid te minderen. Een echte noodstop is natuurlijk (nog) niet mogelijk, aangezien een motorrijder ‘los’ op zijn motor zit. Maar zowel Ducati als Kawasaki hebben een adaptive cruise control die daadwerkelijk bijremt.

Berg technologie
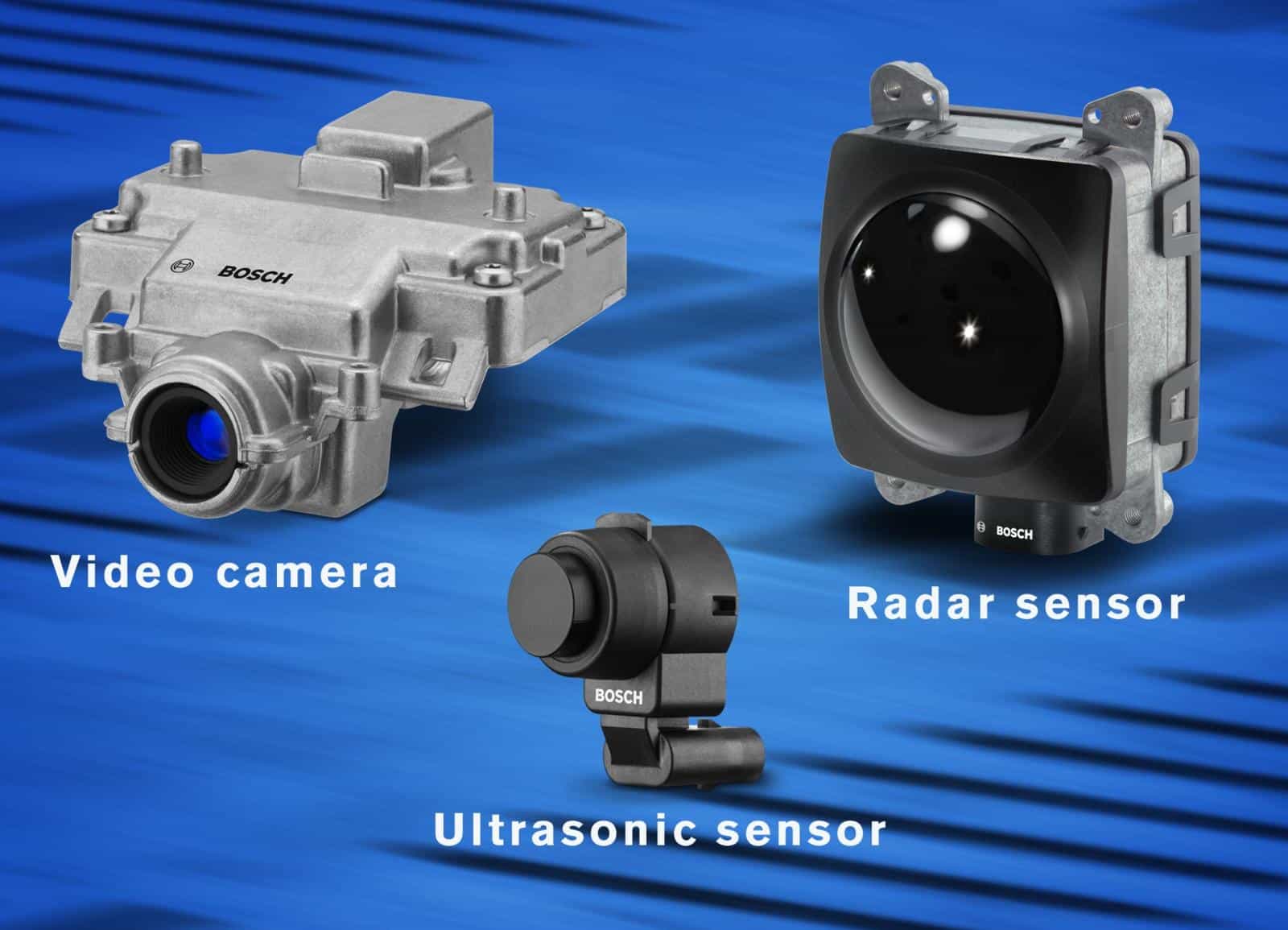
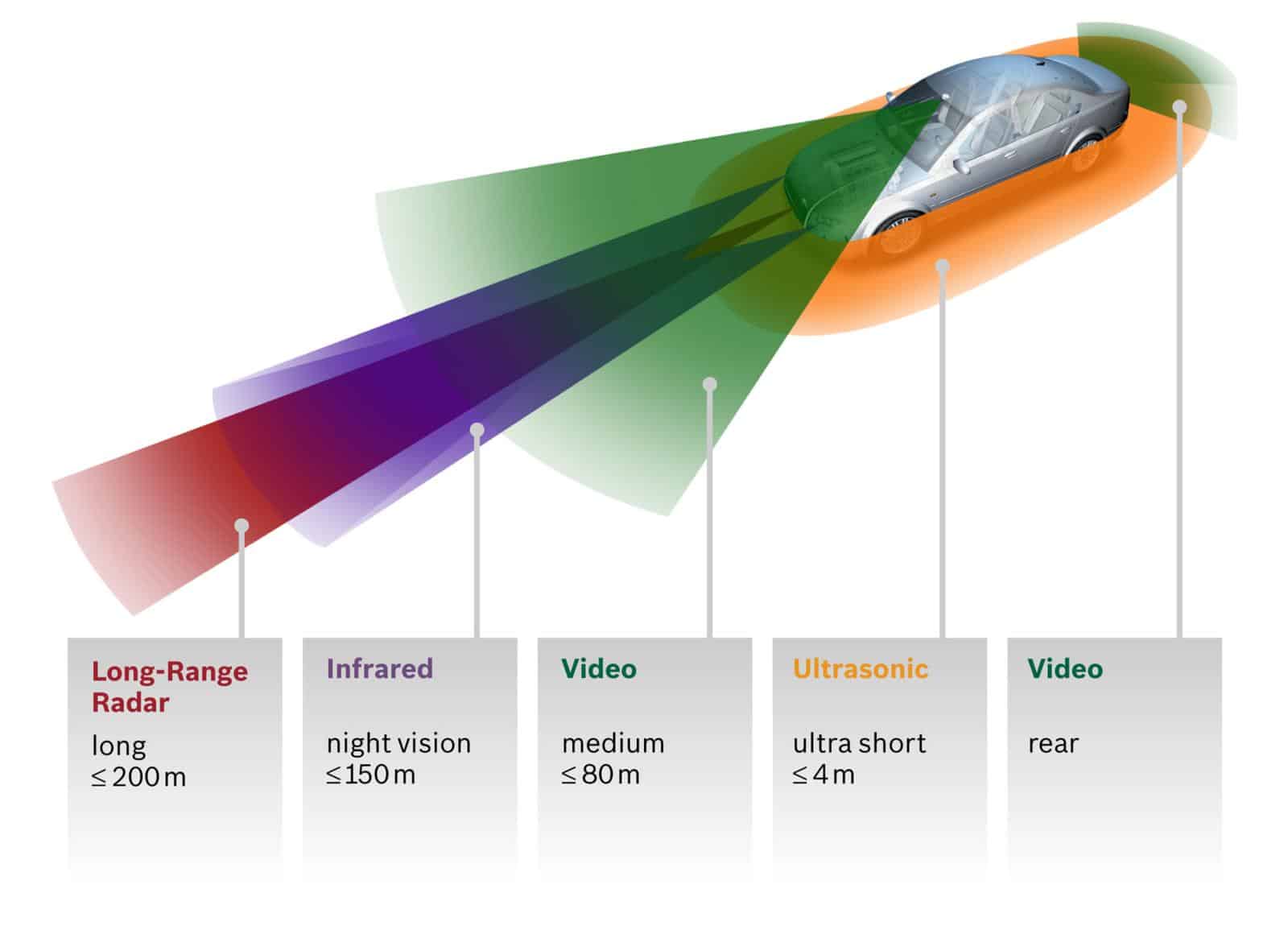
Om autonoom te rijden is er een berg technologie nodig. Zo zijn er sensoren die de omgeving waarnemen, er is gedetailleerd, real time kaartmateriaal nodig, een model van de straat en een accurate plaatsbepaling, algoritmen die het traject en een rijstrategie plannen en actuatoren die het voertuig besturen. En dat alles bestuurd door een computersysteem dat absoluut fail-safe moet zijn. Maar het is er allemaal. Zelfrijdende auto’s zijn voorzien van radarsensoren, die tot 200 meter voor- of achteruit kijken. Een camera kijkt 120 meter vooruit. Lidar-sensoren zien tot 150 meter in de rondte en SRR-sensoren zien tot 40 meter rond het voertuig. Zo ontstaat een 360-graden view rond het voertuig, waarin de auto objecten en verkeerstekens waarneemt, herkent en interpreteert. Want het moet nogal wat vragen beantwoorden. Welke verkeersborden zijn er? Zijn er variabele verkeerstekens (matrixborden)? Zijn er objecten die een gevaar betekenen? Een boom staat stil, maar een voetganger kan oversteken. Auto’s die voor je rijden, kunnen remmen of van baan wisselen. Auto’s die van links en rechts komen ook, maar doen ze dat op tijd? Dus niet alleen positie, maar ook snelheid, versnelling of vertraging en richting van objecten is belangrijk.
Techniek Tweecilinder lijnmotoren: Parallel of niet
V2X
In de analyse van de omgeving speelt communicatie van voertuigen onderling (V2V) en met de infrastructuur (V2X) ook een rol. Heeft het voertuig van rechts een rood stoplicht of niet? Gaat jouw stoplicht op rood of niet? Heeft het ESP of het ABS van een voertuig voor je ingegrepen, omdat er een gladde plek was? Dat vergt ook samenwerking tussen concurrerende auto- en motorfietsmerken, want alle voertuigen zullen in dezelfde taal met elkaar moeten omgaan. Ook is V2X belangrijk voor de plaats- en routebepaling. Een voertuig moet voor een goede routebepaling en een deugdelijke strategie verder kunnen kijken dan de 200 meter van de ‘beste’ sensor. Hij moet weten of er bochten zijn, of er straten afgesloten zijn, of er ongevallen gebeurd zijn of dat er andere obstructies op zijn pad liggen. Kaartmateriaal moet daarvoor eigenlijk real time worden vernieuwd. Dat gebeurt doordat zelfrijdende auto’s hun waarnemingen delen met de cloud, waar de kaartbeheerders (Here, bijvoorbeeld) de waarnemingen direct omzetten in vers kaartmateriaal, dat andere voertuigen weer real time via de cloud kunnen downloaden. Connectiviteit is dus cruciaal en moet altijd blijven functioneren, ook als je de landsgrenzen passeert. Een uitdaging voor de telecom dus. De nieuwste voertuigen zijn daarvoor ‘connected’ met het internet en ‘de cloud’. Dat brengt echter weer andere problemen met zich mee: er moet worden bepaald hoe men omgaat met de grote hoeveelheid data die van en naar de voertuigen wordt gestuurd, voor wat betreft de dataprotectie, de data sharing, de privacy en de beveiliging tegen hacken. Belangrijk is ook dat je zeker weet dat de informatie die de auto krijgt honderd procent klopt. Als de auto een signaal ontvangt dat het stoplicht op groen staat, zal het ook echt op groen moeten staan. Voor al die zaken zal de industrie moeten samenwerken met de overheden en met de universiteiten om tot een internationale harmonisatie en standaardisatie van communicatie te komen.

Vrije ruimte
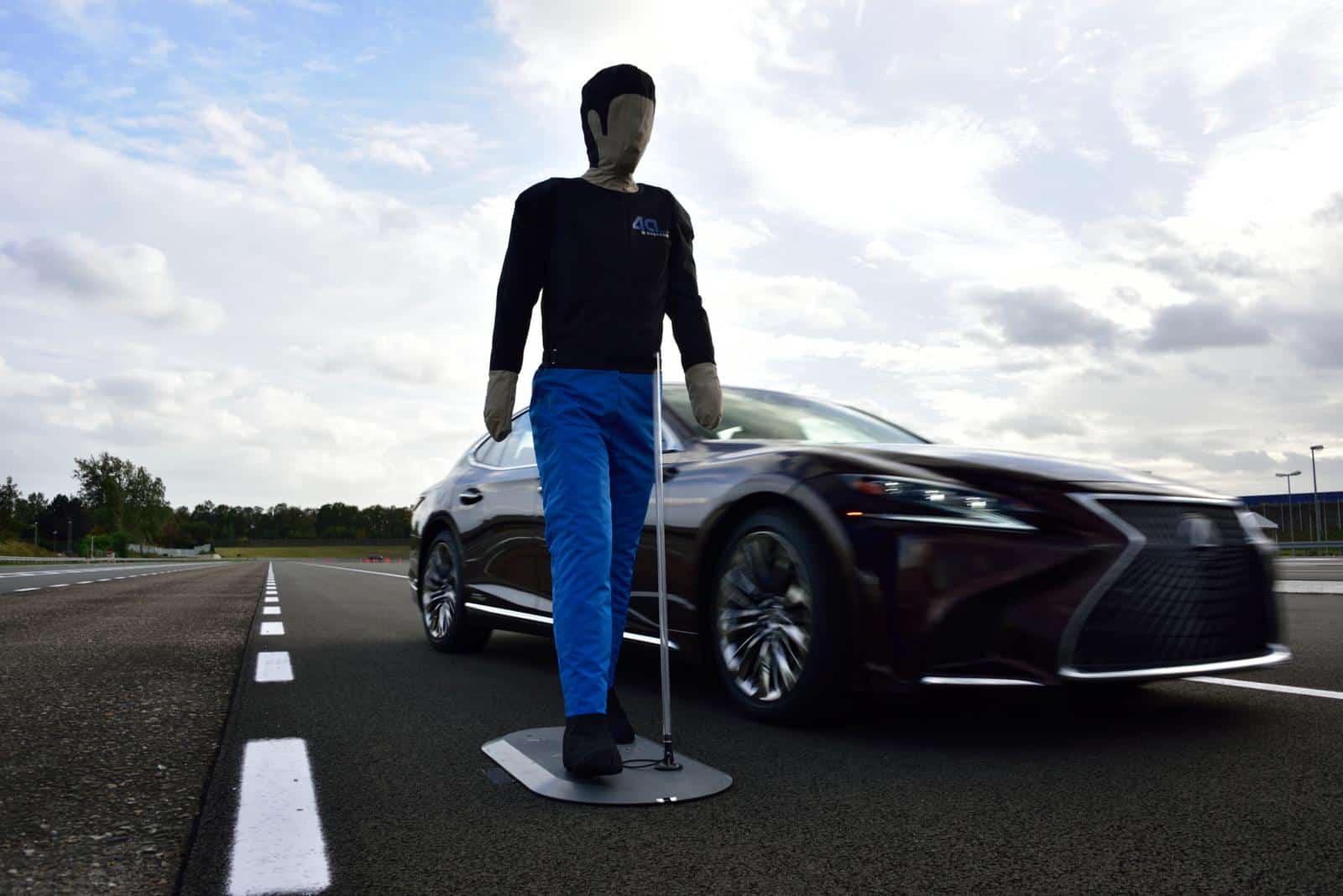
Uit de beelden die alle camera’s en sensoren rond de auto waarnemen en de informatie die via V2X binnenkomt moet het voertuig de vrije ruimte kunnen berekenen en voorspellen, zodat deze real time een full-scene-overzicht krijgt waarmee hij proactief en defensief kan rijden. Het herkennen van stilstaande en bewegende objecten is daarbij cruciaal. Daarvoor zijn diverse AI-technologieën noodzakelijk, zoals computer vision, deep learning, classificatie van computerbeelden, voetgangersdetectie en rijden bij moeilijke omstandigheden, zoals slecht weer. Een van de belangrijkste onderwerpen is de perceptie, de herkenning van de beelden van alle sensoren en camera’s. De beelden moeten snel worden gecombineerd en geanalyseerd, zodat de auto ‘ziet’ wat tot de infrastructuur behoort, wat auto’s, mensen, fietsers, motorrijders en voetgangers zijn en hoe die bewegen. Daarvoor gebruiken fabrikanten onder andere deep learning. Maar ook daarmee blijft het een uitdaging om gebeurtenissen te voorspellen, zoals een kind dat achter een bal aan rent of een auto die afslaat zonder zijn knipperlicht te gebruiken. Dat is erg moeilijk. Mensen kunnen nogal onvoorspelbaar zijn. De ene persoon doet al wat anders dan een andere persoon. Mensen gebruiken daarvoor empathie, de theory of mind. We bepalen wat we doen naar aanleiding van wat we denken dat een ander gaat doen. Dat is voor een computer enorm lastig. Software schrijven die rekening houdt met alle verkeersregels is al een klus, maar dan moet die software ook nog rekening houden met mensen die zich er niet aan houden.
Techniek: hoe werkt een elektromotor?
Ongevallen
Inmiddels zijn er auto’s met een functionerende Highway Assistent, waaronder Tesla. Een artikel van FortNine suggereert dat die niet helemaal probleemloos is. (zie ook https://www.youtube.com/watch?v=yRdzIs4FJJg). Er zijn volgens deze video twee dodelijke ongevallen geweest door autonoom rijdende Tesla’s, die ’s nachts achterop een motorfiets reden. Dit zou wellicht komen doordat de software van Tesla de motorfietsen niet ‘zag’ of herkende, wellicht doordat deze motoren dubbele achterlichten hadden. Er kunnen dan dus twee dingen aan de hand zijn: de sensoren van de Tesla nemen de motoren niet of te laat waar, of de sensoren zien ze wel maar de software classificeert ze niet als een object waar de auto omheen moet rijden. De video suggereert dat de sensoren aan de basis van het probleem liggen: Tesla zou uit bezuinigingsoogpunt geen lidar en radar gebruiken, maar alleen gebruikmaken van optische sensoren. De software heeft dus minder data om de vrije ruimte te berekenen en maakt daardoor fouten. InsideEVs.com meldt dat de autopilot bij een van de Tesla’s zeker aanstond maar dat de Atonomous Emergency Braking-functie van de Tesla ook zonder autopilot had moeten ingrijpen. De National Highway Traffic Safety Administration (NHTSA), dat beide voorvallen onderzoekt, stelt dat de autopilot echter in beide ongevallen actief was. Het blad ARS Technica stelt dat de NHTSA inmiddels elf ongevallen onderzoekt, waarin Tesla’s andere voertuigen niet herkenden. De NHTSA onderzoekt verder of het verwijderen van de radarcamera’s de oorzaak is van honderden klachten over ‘phantom braking’, het plotseling, zonder aanwijsbare oorzaak remmen van deze Tesla’s. Autoblog.com stelt zelfs dat de NHTSA in totaal 39 crashes met autopilots heeft onderzocht, waarvan dertig Tesla’s, resulterend in negentien doden. Tesla zou volgens dit artikel hebben geantwoord dat hun autopilot en ‘full Self-Driving’-systeem niet zelfstandig kunnen rijden (?) en dat automobilisten te allen tijde in staat moeten zijn om in te grijpen. Het zou dan dus een menselijke fout zijn.
Wat nu?
Uiteraard heb ik Tesla zelf ook gevraagd om hun visie op dit probleem te geven – meermaals zelfs –, maar de persvoorlichters van Tesla zwijgen in alle talen. De vraag is nu of ze geen bevredigend antwoord hebben en dat er dus daadwerkelijk een veiligheidsprobleem met de Tesla’s is, of dat ze mij gewoon niet belangrijk genoeg vinden.
De National Highway Traffic Safety Administration onderzoekt volgens Reuters nu 830.000 Tesla’s om te bepalen of er een terugroepactie moet komen. Het California Department of Motor Vehicles klaagt Tesla in elk geval aan voor misleidende marketing, omdat ze als ‘full self driving’ worden verkocht, maar het niet kunnen. Dat kan ertoe leiden dat Tesla’s in Californië niet meer mogen worden verkocht. Het Duitse Kraftfahrt-Bundesambt onderzoekt momenteel het ‘lane keeping’-systeem en de automatische baanwisselfunctie van Tesla. Het zou volgens het Duitse Bild ook in gesprek zijn met de RDW, zo meldt RTL-nieuws. Het muisje krijgt dus nog een staartje.
Ondertussen is het dus zaak om als motorrijder goed in de spiegels te blijven kijken en hopen dat motorfabrikanten een achterwaartse radarcamera ontwerpen die waarschuwt voor aanstormende Tesla’s. Verder moeten we ons natuurlijk afvragen of een wereld zonder verkeersdoden echt een haalbare zaak is. Als een autonoom rijdende auto niet foutloos of feilloos is, maar wel minder verkeersdoden veroorzaakt dan de mens, is het dan niet toch vooruitgang?


Mooi artikel! Er komt een heleboel techniek kijken, bij zelfrijdende auto’s, maar ik denk dat het menselijke aspect ook belangrijk gaat worden. Wat techniek betreft: ik geloof niet dat auto’s de eerste 25 jaar helemaal zelf kunnen rijden. Autowegen zal nog wel lukken, maar de Amsterdamse grachten? Lossende vrachtwagen voor je en 20 fietsers achter je? En het menselijke aspect: hoe gaat de maatschappij reageren als de eerste voetganger wordt doodgereden door een auto? (dus niet door de bestuurder!) Een onvoorzichtige berijder kan je nog straf geven, maar een auto? En dan is er nog het privacy-aspect; al die sensoren en camera’s(!) op zo’n auto; wat leggen die vast en wie kan er naar kijken? Neem een bedrijf als Google, waarom denk je dat die deze auto’s ontwikkelen? Om autofabrikant te worden? Of wellicht om via die camera’s de wereld nóg beter in de gaten te houden? In Duitsland mogen Tesla’s precies om die reden al niet meer op militaire bases rijden. Kortom, maatschappelijke discussie is hier, naast de techniek, zeker van belang.