
De voertuigdynamiek van een motorfiets – oftewel de manier waarop een motorfiets beweegt – is behoorlijk gecompliceerd. Er zijn enkele geometrische parameters, die zorgen dat onze motorfiets zijn koers op een stabiele manier volgt.
Waarom valt een motorfiets eigenlijk niet om? Wat betekenen balhoofdhoek, wielbasis of naloop? Welke invloed hebben deze gegevens op het rijgedrag van de motor? Welke rol spelen het gewicht of de massa van het voertuig? Een boel vragen. En ze zijn niet allemaal even gemakkelijk te beantwoorden. Automobilisten hebben het gemakkelijker. Hun voertuig kan immers niet omvallen.
Een motorfiets is echter een enkelsporig voertuig, dat bij stilstand omvalt. Hij moet dus op de ene of de andere manier worden ondersteund. Bij stilstand heb je daarvoor natuurlijk de zijstandaard of de middenbok, bij het stoplicht zorgen je benen daarvoor, mits die lang genoeg zijn. Maar waarom heb je die ondersteuning niet nodig als je rijdt, zelfs niet als je langzaam voortbeweegt?
Om deze vragen te beantwoorden moeten we verschil maken tussen twee snelheidsintervallen. Bij een hele lage snelheid – stapvoets rijden dus – zorgt de rijder zelf in eerste instantie met zijn eigen balansgevoel voor de stabiliteit van de motorfiets. De stabiliserende gyroscopische krachten van de wielen en de gehele geometrie van het rijwielgedeelte hebben hierop nog nauwelijks effect.
Bij het toenemen van de snelheid neemt de invloed van de rijder zelf op het evenwicht van de machine af. De gyroscopische krachten en het krachtenspel, dat door de constructie van het rijwielgedeelte ontstaat, nemen het commando steeds meer over, samen met de massa van het voertuig inclusief bemanning en belading.
Is het tijd om ketting en cardan met pensioen te sturen?
De wielen
Roterende lichamen waarop geen kracht wordt uitgeoefend, behouden hun positie in de ruimte. Natuurkundigen zeggen dan: ‘Roterende lichamen waarop geen kracht wordt uitgeoefend, behouden hun positie in de ruimte.’ En dat is precies wat de wielen van je motorfiets proberen te doen. Ze kunnen relatief gemakkelijk bewegen in richtingen, die in de rotatierichting of haaks daarop liggen; dus naar voren en naar achteren, naar boven of naar onderen, naar links of naar rechts. Draaien of omkiepen gaat echter bijzonder moeizaam. Dat is de hoofdreden voor de verbazingwekkende stabiliteit van een enkelsporig voertuig.
Daarnaast heeft de manier waarop de wielen bij de motorfiets ten opzichte van elkaar zijn gemonteerd een grote invloed op het rijgedrag. Voorwaarde daarbij is: het voor- en achterwiel zijn via een scharnier met elkaar verbonden. Dit scharnier heet het ‘balhoofd’. Bijna alle motorfietsen hebben dit, behalve BMW’s die zijn voorzien van een Telelever-voorwielophanging. Zonder dit balhoofd zou je geen bocht kunnen maken.
Wat echter minder voor de hand ligt: zonder dit scharnierpunt zou je ook binnen de kortste keren op je plaat gaan als je rechtuit zou proberen te rijden. Waarom? De gyroscopische krachten op de wielen en hun streven stabiel in de ruimte te roteren mogen dan groot zijn: een verstoring – zijwind, oneffenheden, een verplaatsing van het zwaartepunt van de rijder – zorgt er desondanks snel voor dat de wielen uit hun rotatievlak worden verplaatst. Zonder stuurinrichting is er geen mogelijkheid meer het wiel in zijn loodrechte positie terug te brengen – dan vallen we om.
Het stuurgedrag
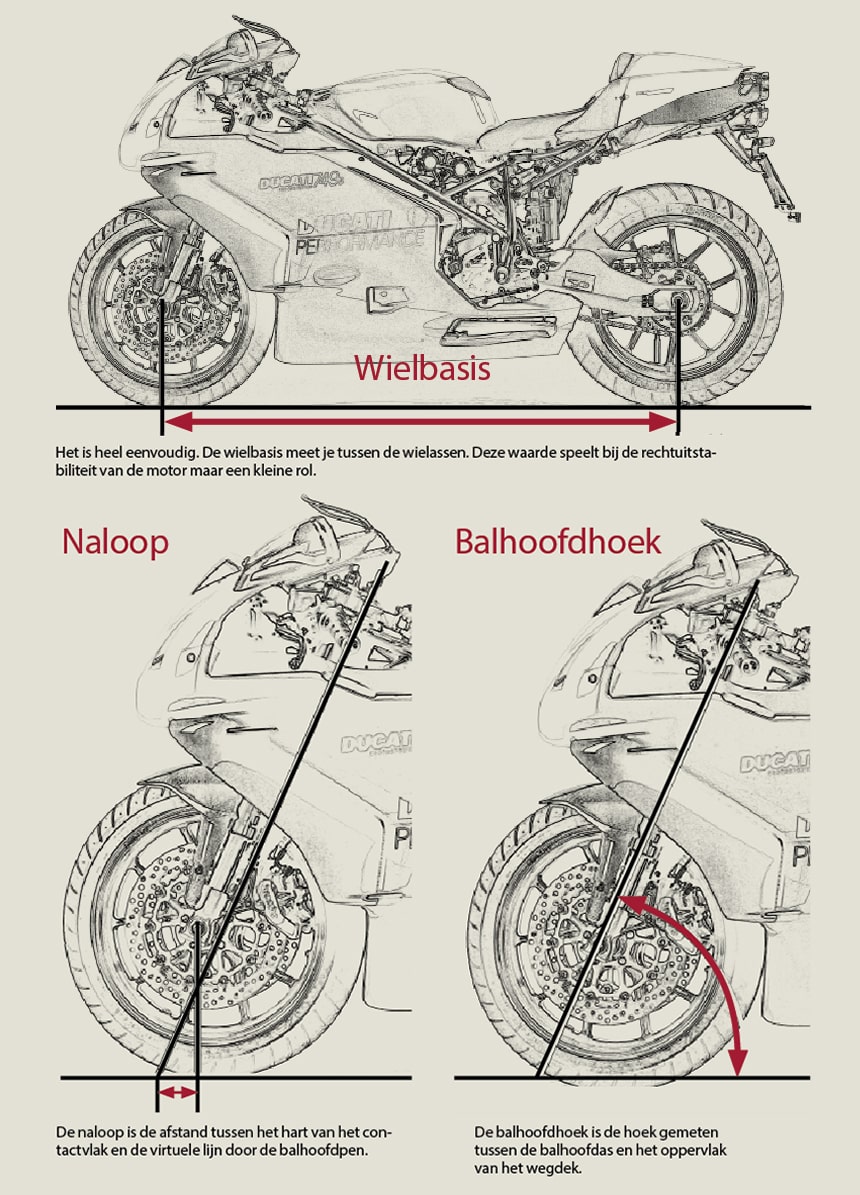
Drie belangrijke grootheden bepalen het stuurgedrag van een motorfiets: de wielbasis, de balhoofdhoek en de naloop. De wielbasis is de afstand tussen de beide wielassen. Normaalgesproken ligt die tussen 1.350 mm – bij kleine en sportieve motoren – tot 1.550 mm of zelfs meer bij grote cruisers, toermachines en allroads. De balhoofdhoek is de hoek waaronder de stuuras staat. Wij geven hierbij de hoek tussen het wegdek en de stuuras op. Die ligt meestal tussen 55 en 65 graden. De naloop is echter nog veel belangrijker voor de rechtuitstabiliteit dan de beide andere factoren.
Laten we de motor eens van de zijkant bekijken: als we ons een lijn voorstellen die de balhoofdpen naar beneden toe verlengt – een lijn die dus parallel aan, maar net iets achter de voorvork naar beneden loopt –, dan komt die ergens op het wegdek terecht. Dat punt ligt doorgaans voor het hart van het contactvlak van de band. Er zijn uitzonderingen, daar komen we later op terug. De afstand tussen deze twee punten noemen we de naloop.
Op een tekening kun je dat veel duidelijker zien, dan dat je het kunt beschrijven. De naam ‘naloop’ geeft aan dat het voorwiel de stuuras met deze afstand achternaloopt. Als het evenwicht wordt verstoord en er gestuurd wordt, dan staat het hart van het contactvlak niet meer recht achter de stuuras, maar iets meer naar de zijkant. De wrijving van het rubber op het wegdek trekt het wiel terug achter de stuuras en de motor loopt weer rechtuit. Dit effect treedt zeer snel en veelvuldig op, in werkelijkheid rijden we eigenlijk altijd een slingerlijn.
Rechtuitstabiliteit
De wielbasis en de balhoofdhoek hebben een kleinere invloed op de rechtuitstabiliteit dan men vaak denkt. In principe heeft een lange wielbasis een positief effect op de rechtuitstabiliteit. De balhoofdhoek is voor dit fenomeen echter totaal onbelangrijk. Er zijn diverse constructieve maatregelen waarmee je de gewenste naloop bij elke gekozen balhoofdhoek kunt bereiken.
Bij het ontwerp van een motorfiets geeft de fabrikant aan welke naloop hij voor deze motorfiets het beste vindt. Bij in serie geproduceerde motoren, die een goede rechtuitstabiliteit moeten hebben, is dat in de regel 60 tot 130 mm. In principe geldt: hoe groter de naloop, hoe groter de terugstelkracht, die het wiel weer achter de stuuras terugtrekt. En dus hoe groter de stabiliteit van de motor en hoe minder wendbaar.
Het rare is echter, dat de naloop tijdens het rijden geen constante waarde is. Wanneer de machine in- of uitveert, verandert de hoek van de stuuras ten opzichte van het wegdek. Daardoor verandert ook de naloop. Als de machine achter inveert, wordt de ‘balhoofdhoek’ vlakker en de naloop langer. Het tegenovergestelde gebeurt als de machine aan de voorkant inveert: nu wordt de balhoofdhoek steiler, de naloop korter.
Hetzelfde gebeurt als het voorwiel over een hobbelige weg of op een verhoging rolt: dan verandert namelijk ook het contactvlak van de band. Als je tegen een stoeprand oprijdt, verplaatst het contactvlak op de wielomtrek bijvoorbeeld naar voren, de naloop wordt korter en kan in het extreme geval zelfs negatief worden.
Hobbelig wegdek
Met al die veranderingen verandert natuurlijk ook de wrijvingskracht van het bandrubber, die het voorwiel weer achter de stuuras terugtrekt. Op zeer hobbelige wegen kan een sterk wisselend terugstelmoment voor een onrustig weggedrag zorgen.
Dit effect wordt groter naarmate het voorwiel kleiner is. Grote 21-inch wielen reageren duidelijk minder gevoelig op oneffenheden dan kleine scooterwielen, waarbij op hobbelige wegen duidelijke veranderingen van de naloop te voelen zijn.
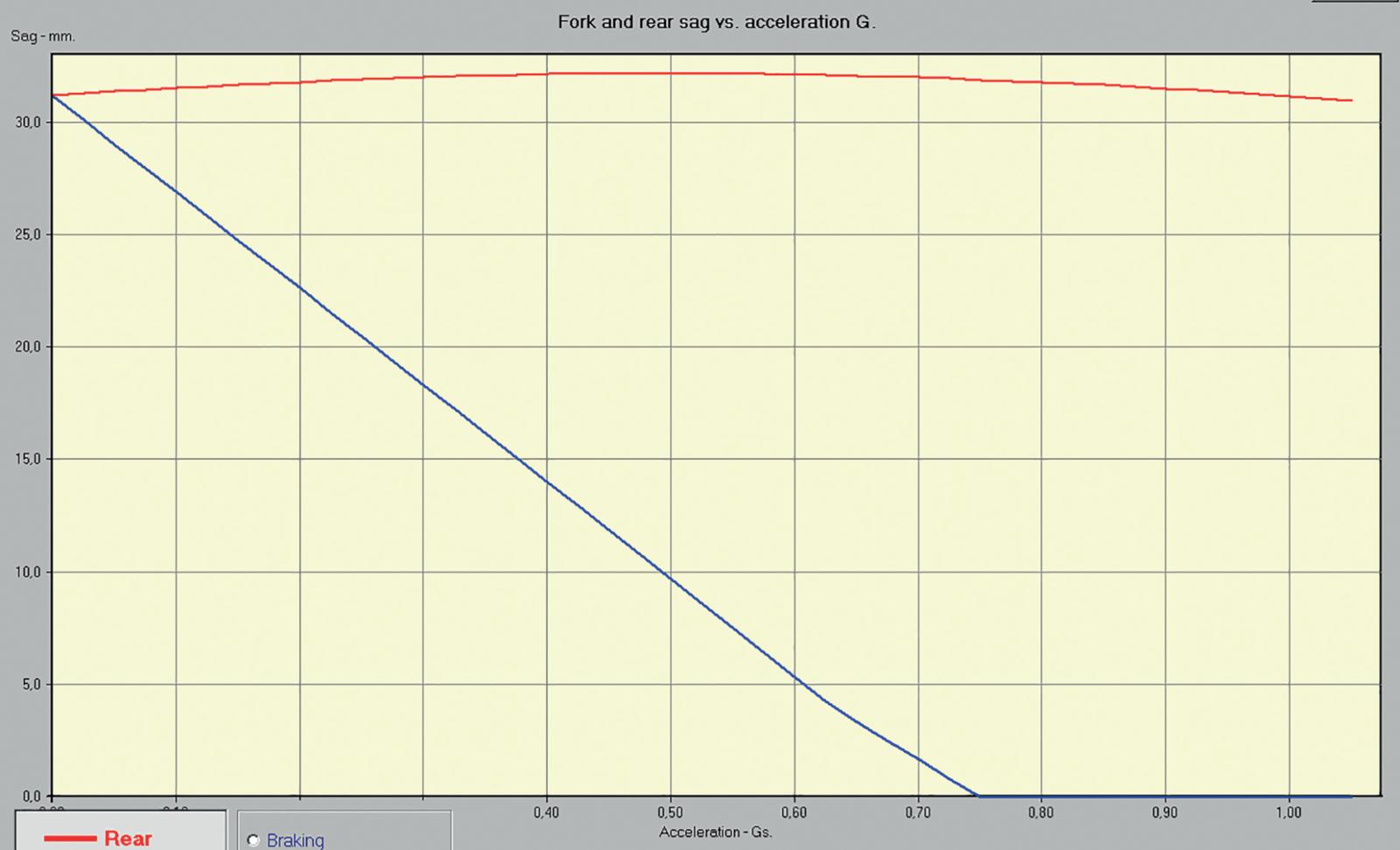
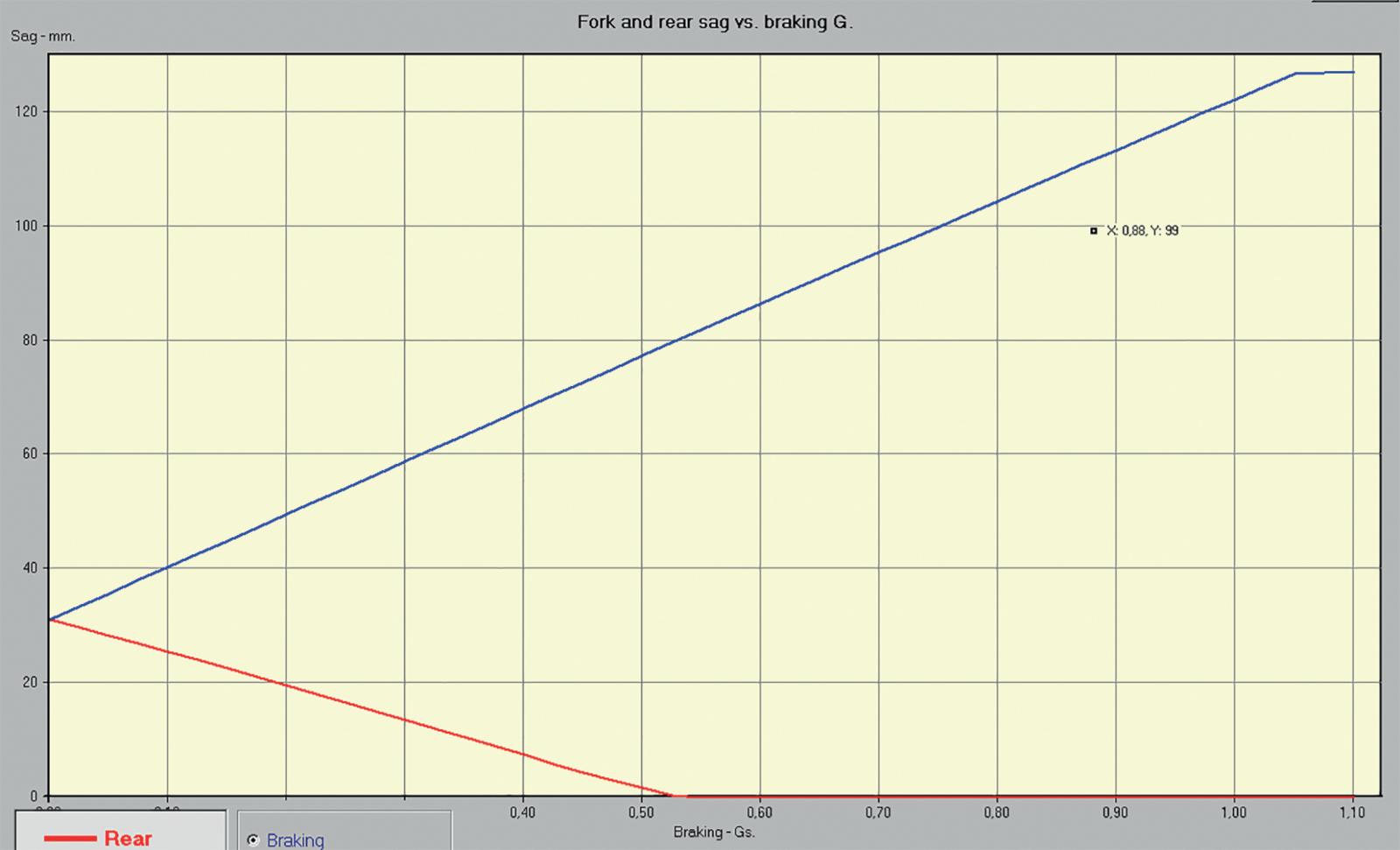
Hoe groot deze veranderingen in het weggedrag werkelijk zijn, wordt in onze grafieken duidelijk weergegeven. Die zijn gebaseerd op een software-simulatie, waarbij de geometrie, het gewicht, de ligging van het zwaartepunt en vele andere parameters van een Ducati 1098 zijn meegerekend.
Hier kun je eenvoudig zien dat de naloop tijdens het rijden kan variëren tussen 70 mm – bij hard remmen – en 110 mm bij vol accelereren. Je ziet eveneens wat er gebeurt als de rijder bij het accelereren gas geeft: de naloop verandert ook al, wanneer de rijder alleen maar gas opent of dichtdraait.
Flexibel aandrijfsysteem
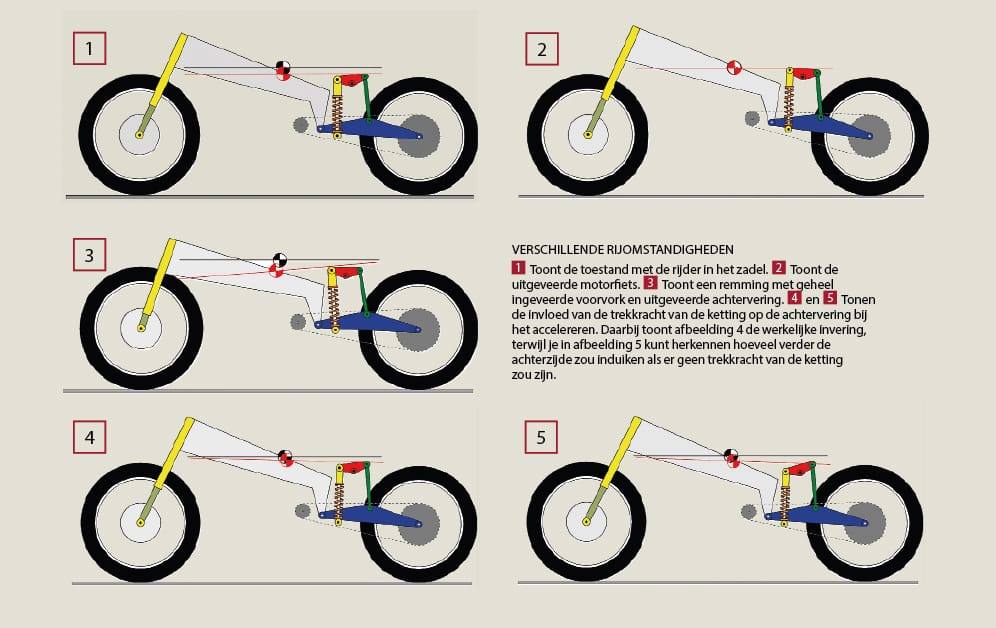
Onze motoren zijn sinds de Tweede Wereldoorlog bijna allemaal uitgerust met achtervering. Dat geeft natuurlijk een probleem bij de aandrijving van het achterwiel. Het achterwiel kan bewegen ten opzichte van de motor en de versnellingsbak. Omdat het wiel om de swingarmas draait, beweegt het wiel in een cirkelboog om deze as heen. Daarom hebben we ook een soort flexibel aandrijfsysteem nodig. Daarvoor wordt tegenwoordig een ketting, een tandriem of een cardan met een of twee kruiskoppelingen gebruikt (zie ook M73 1/2021). En natuurlijk werken de aandrijfkrachten van de motor bij deze systemen ook verschillend op het rijwielgedeelte.

Bij de meest voorkomende kettingaandrijving ontstaat er bij het accelereren bijvoorbeeld een moment rond de swingarmas, dat probeert de motorfiets uit de vering te tillen. De grootte van dit moment hangt af van de hoogte van de uitgaande as van de versnellingsbak, de hoogte van de swingarmas ten opzichte van de uitgaande transmissie-as, de lengte van de swingarm, de diameter van het voorste kettingwiel en natuurlijk ook van het geleverde motorvermogen.
De samenhang tussen deze factoren is relatief complex en verandert bovendien deels tijdens het inveren van de motorfiets. Netto geldt echter voor de meeste motoren met kettingaandrijving: bij het accelereren probeert de machine zich achter uit de vering te tillen.
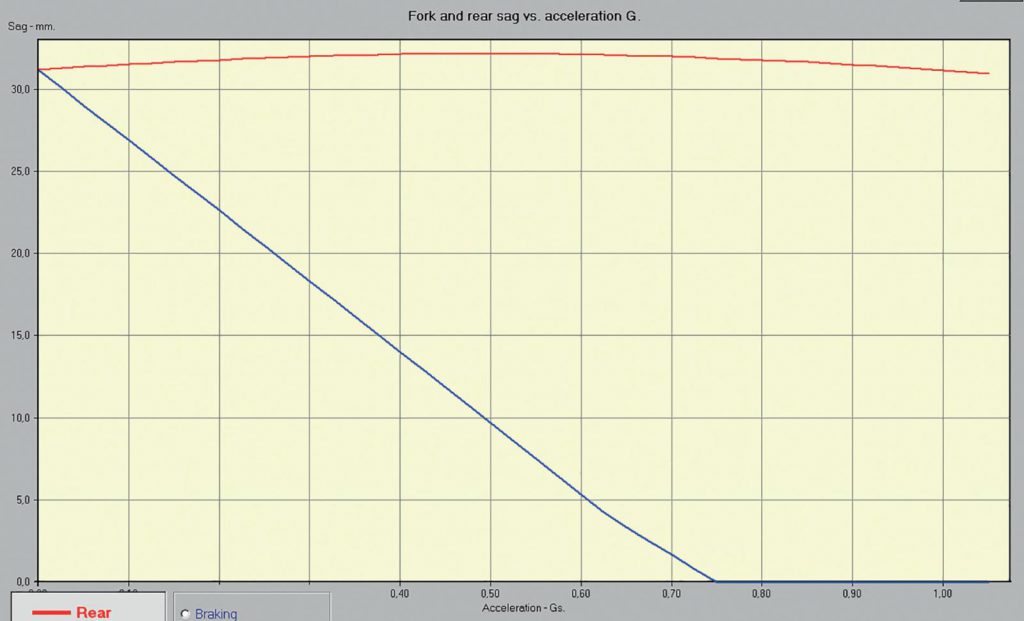
Veerbeweging bij het accelereren. Terwijl de voorvork – blauwe lijn – geheel uitveert, beweegt de achterschokdemper vanwege de trekkracht van de ketting nauwelijks. 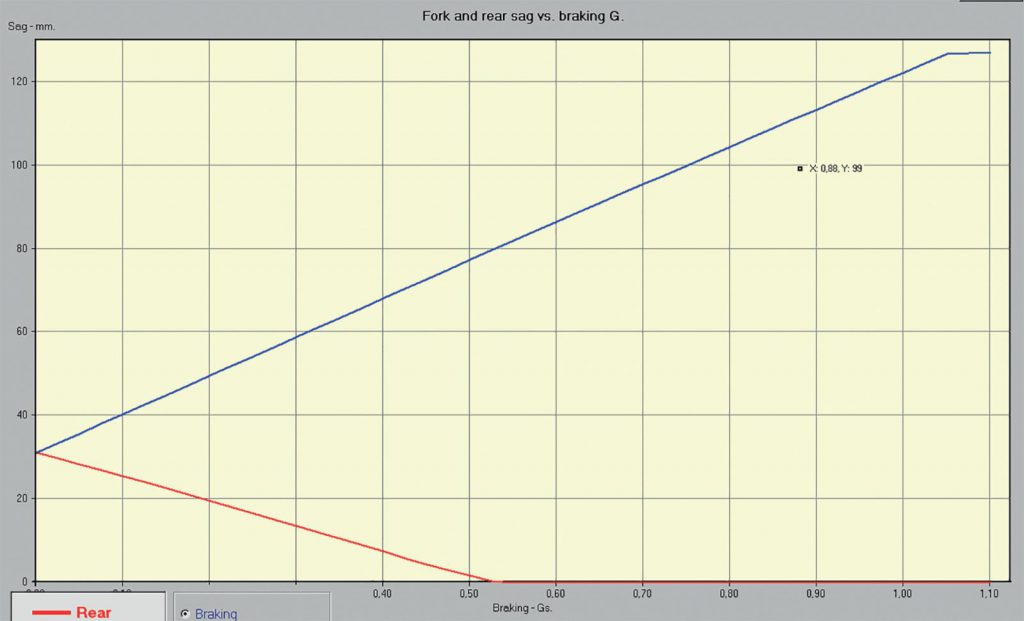
Remmen. De voorvering – blauwe lijn – gaat in de aanslag. De achterzijde – de rode lijn – is al eerder geheel uitgeveerd.
Dat werkt precies tegenovergesteld aan het effect, dat de machine bij het accelereren door de dynamische aslastenverandering juist inveert. Dat zorgt ervoor dat het eerste effect doorgaans niet door de rijder wordt opgemerkt.
Bij een cardanaandrijving treedt in theorie hetzelfde effect op, hoewel het in de praktijk een beetje anders uitpakt. Bij een cardan heb je geen voorste kettingwiel, wat de geometrische effecten in de eindaandrijving nogal vereenvoudigt. Het oprichtmoment van de cardan wordt, behalve door het actuele motorkoppel, alleen door de lengte van de swingarm bepaald. Aangezien die bij de meeste klassieke cardanmotoren van BMW en Guzzi vanwege de totale lengte van de in de lengte draaiende aandrijflijn relatief kort uitvalt, zijn die reacties van de kont van de motor relatief opvallender dan bij een ketting aangedreven motorfiets.
Die reactie wordt bij bijna alle cardanmotorfietsen tegengegaan door toepassing van een systeem met vier scharnierpunten, dat bij alle fabrikanten volgens hetzelfde principe functioneert. Bij BMW heet het Paralever, Guzzi noemt het CarC. Maar ook deze systemen reduceren de aandrijfmomenten niet tot nul. Niet dat het technisch onmogelijk zou zijn, het is meer dat een geringe mate van oprichtmoment zelfs wenselijk is. Eenvoudig gezegd verbetert het de grip van het achterwiel bij het accelereren. Precies het effect dat je op dat moment nodig hebt.
Wat is Skyhook-techniek nou precies?
GP-machine
Vanwege de complexiteit van al deze parameters is het niet zo vreemd dat zelfs de beste coureurs ter wereld er vaak niet in slagen om een motor optimaal op een bepaald circuit af te stemmen. Bij zoveel verschillende mogelijke varianten van balhoofdhoek, voorvork-offset, grootte van het kettingtandwiel, lengte van swingarmas, positie van de swingarmas, zwaartepunt en andere parameters, waarover deze GP-machines beschikken, kan het lastig zijn om de juiste combinatie te vinden binnen de beperkt beschikbare trainingstijd.
Het is maar goed dat de ingenieurs al deze factoren bij de constructie van onze motorfietsen al hebben bepaald. Zodat wij ons tijdens het rijden niet al te zeer met deze instellingen bezig hoeven te houden.
